 Maulik
MaulikIntroduction
AranyaLink: Open-Source Forest Fire Detection Mesh Network
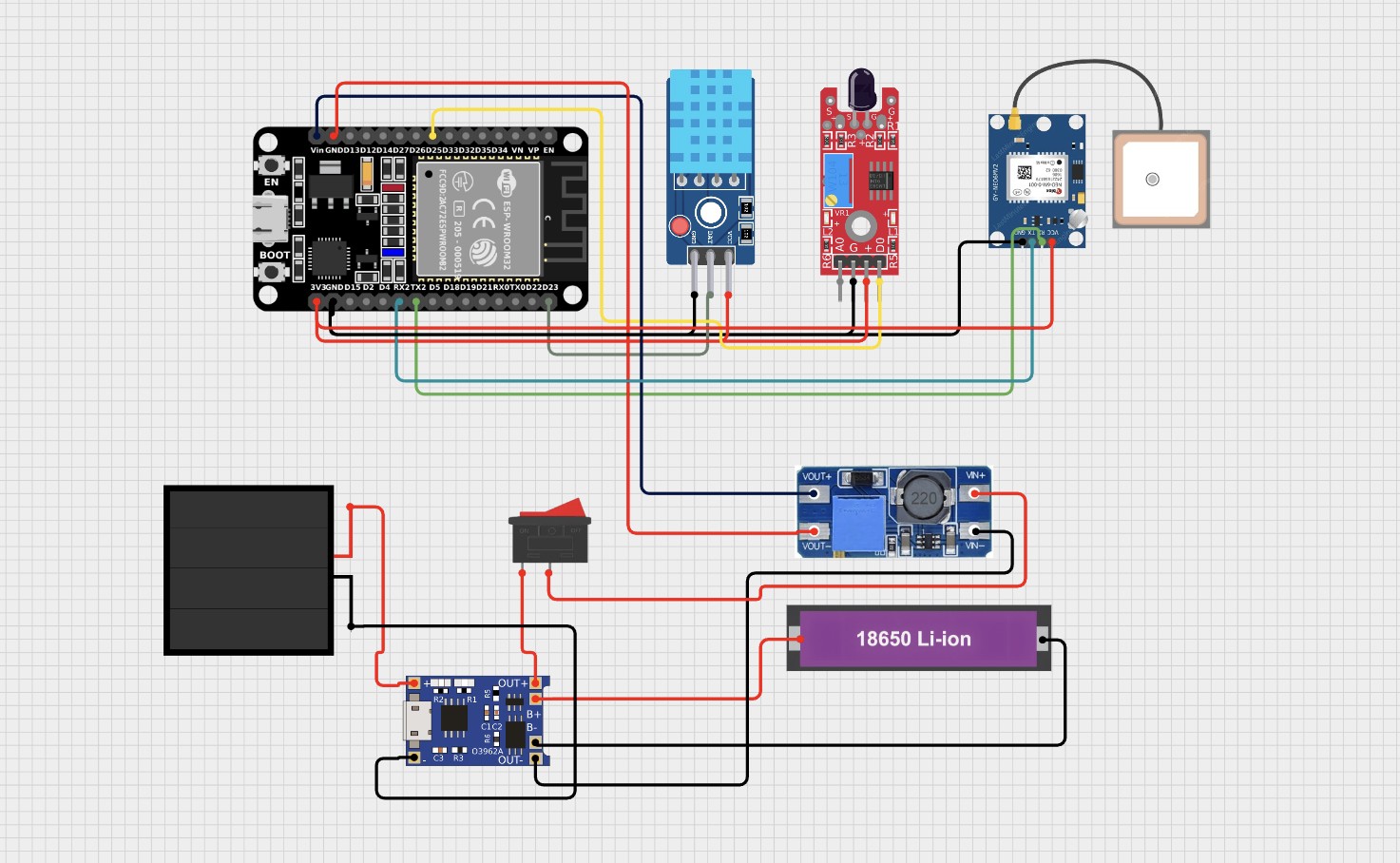
Aranya (अरण्य) is the Sanskrit word for forest. In the ancient world, it represented a philosophy of radical environmental interdependence—the core truth that when you protect the forest, you protect everything the forest sustains. AranyaLink is an infrastructure-free, low-cost wildfire early-warning platform designed to democratize conservation technology. Built on standard ESP32 microcontrollers, each fully autonomous node costs less than $10 to manufacture and requires absolutely zero cellular network connections, internet routers, central clouds, or subscription fees.
System Architecture & Network Logic
Traditional early-warning deployments rely on a standard hub-and-spoke configuration, where every remote element pushes telemetry up to a central gateway. In a massive wildfire, that central gateway is the exact piece of tracking infrastructure most likely to be overrun and destroyed by the expanding fire front, killing the entire network instantly.
AranyaLink completely removes the central coordinator. It utilizes a completely flat, decentralized, peer-to-peer routing topology running over the ESP-NOW radio protocol. Every node functions simultaneously as a localized detection terminal and an independent repeater node.
[ Ignition Event ]
│
▼
[ Node 1 (Detect) ] ──(ESP-NOW Broadcast)──► [ Node 2 (Verify & Relay) ]
│
(ESP-NOW Multi-Hop Link)
│
▼
[ Node 3 (Verify & Relay) ]
│
(Canopy Perimeter Exit)
...
Read more »

 Arshia Keshvari
Arshia Keshvari
 Dave Floyd
Dave Floyd
 aloismbutura
aloismbutura