Sign up to chat with world's largest collaborative hardware development community.
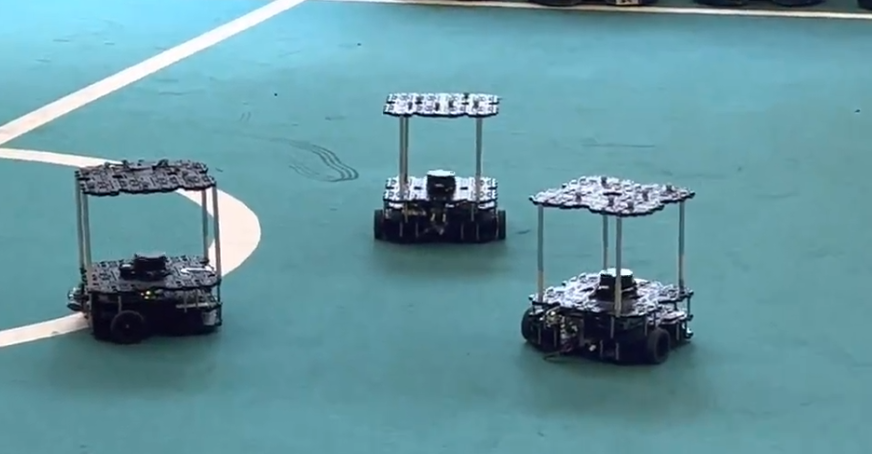
A simple triangular pattern formation using three robots, by autonomous optimal position allocation in the pattern