 oshpark
oshparkJulien Vanier created this CAN bus simulator on the Raspberry Pi to help develop and test the Carloop open-source car adapter:
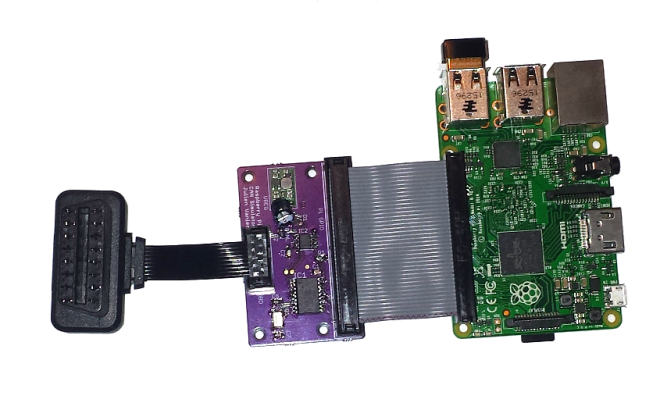
CAN Simulator
used to transmit and receive messages simulating OBD-II communications and regular vehicle messages
The simulator consists of:
- MCP2515 standalone CAN controller connects to Raspberry Pi over the SPI bus
- TJA1049 CAN transceiver translate logic levels for high speed CAN
- 5V to 12V step up regulator to provide 12V on ODB connector
- Off-the-shelf OBD cable and connector
- Simulator program on the Raspberry Pi
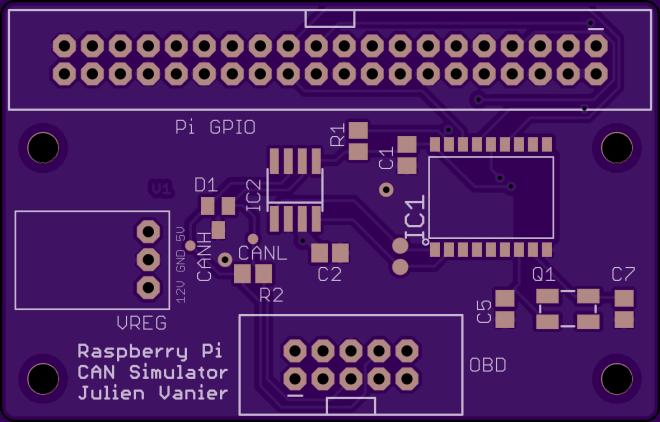
jvanier shared the board on OSH Park:
CAN-Simulator v1
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.