 helge
helgePhysics hates these problems.
The future may smile weakly but this is 2018, a time where one would assume that most, if not all mechanical problems can be considered solved and everything has just been reduced to a "make more, faster, cheaper" game.
Fear not, there are still many problems lacking "proper" solutions. From temperature measurements over 2d surfaces one cannot stare at with a thermal camera to (spatially resolved) force measurements INSIDE solids (not the neutron scattering approach to Gigapascal pressures, mind you, just down-to-earth Megapascals), residual stress to even seemingly simple mechanical building blocks like linear actuators, what we have as of now just doesn't seem right.
Fujifilm Prescale paper for example is one of those "good enough" solutions where you pick a pressure range, slap a sheet of material on your contraption, clamp it down, tear it apart again and see if you hit the target. You get one shot.
On the high tech side of things, residual stress analysis is a crazy destructive mashup of x-ray diffraction and electropolishing. Undoubtedly cool but time consuming and expensive. Random pick for further reading:
http://www.veqter.co.uk/residual-stress-measurement/x-ray-diffraction
While the measurement applications tend to massively interfere with the finished product (like breaking electrical and thermal paths and corrupting mechanical stability), things like actuators which actively have to do something don't seem to get to a stage with proper implementations. Actuators often rely on a fundamentally rotational motion converted into a linear one and the piezo driven structures inherently need to convert sub-micrometer motions to macroscopic vibrations and associated displacements.
Linear actuators - or: why artifical muscles aren't there yet
I don't claim any authority in the field of actuator principles but have accumulated a certain amount of frustration in my time by reading about "breakthrough" actuator designs time and again that turned out to be just another piece of rubber tubing in a mesh to keep it from balooning out of control. Or maybe it's a bit like lithium ion batteries that creep towards a brighter future so slow it feels like regression despite significant yet underappreciated technological advances.
Since we're interested in small actuators and low force, yet elegant motions (think: cats :D) a gasoline powered hydraulic compressor of the Boston Dynamics kind is out of the question.
As candiate technologies there are electroactive polymers which are as elusive as their development kits, piezoelectric polymers (polyvinylidene fluoride and its copolymer with trifluoroethylene) where the TrFE compound is about the price of silver by volume, coiled carbon fiber muscles one might rather call renewable asbestos and electroosmotic implementations that need kilovolt driving voltages to perform their dance over the course of ten seconds.
The only technology I actually find at least a bit magical is that of ultrasonic piezo motors because they are nice and quiet and create well behaved motion. My first contact with this technology dates back to a broken Canon USM lens I took apart to find that a ring hat vibrated loose, removing motor preload.
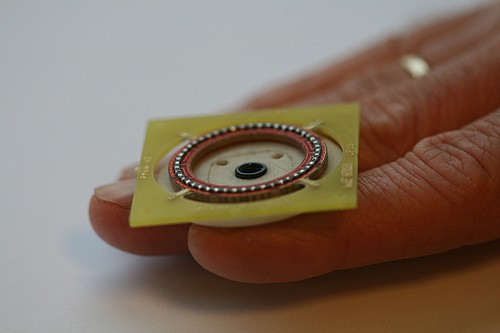
The type of ultrasonic motor used in photographic lenses with larger elements is a traveling wave ring type one as depicted here:
Usually there are two, at most three phases connected to the ring to generate a propagating shear wave. It's rather a vibration mode of the ring which is held in place by a thing spring washer. Unfortunately this principle does not exactly lend itself to linear drive applications.
One step up the ladder there are stick-slip drives which are driven by a sawtooth / asymmetric triangle voltage waveform and use the inertia of the central shaft to unstick and reposition with every step. They are cool for non-magnetic positioning stages in magnet cryostats but for robotics.... not so much so. Plus after a year of working with them I'm done listening to their high pitched noise.
Then there are the legged things. The Inchworm drive has groups of piezos for clamping and unclamping and a cycle of clamping, translation, unclamping and a second translation by contraction. I recently scored a set of three inchworm micrometers with a total travel of 6mm and about 7nm per step. Not blazingly fast though. Good for tuning optical cavities and resonators but not really much in terms of moving things around.

Both the inchworm and the LEGS arrangement from PI are inherently non-resonant in their working principle and lend themselves to nanometer scale resoluions. In the video below they also show a resonant "Ultrasonic" drive with a contact finger in elliptical motion. These produce lower forces but seem to be rather fast, at µm to tens of centimeters per second. Might be worthwhile.
What might actually work for robotics
Now that we've seen that there are many piezo applications suited for precision applications in optical and mechanical equipment, there is some hope for lower cost and faster applications closer to robotics as well.
There is this resonant housing contraption for example which pushes against a linear or circular object to create motion:
Thorlabs markets this type of resonant actuator as a linear stage for optical benches.

... and then there is this type of rotary actuator which they actually managed to build a tripod robot from:
But ultimately I'm looking into designing a sort of resonant type linear actuator with these SMD piezo elements (reflow capable):
Note they again show the resonant ring type geometry but one can also buy the piezo elements as taped 0404 SMD parts and go from there.
I'm not planning to make this a full blown project. For now I just want to come up with two or three concepts for resonant? linear piezo drives and demonstrate them. They are nice and don't emit the typical RC servo squeal.
Seriously, everything other than RC servos and stepper motor spindle drives is a step forward in my opinion :)
___
also check out Fabien et al. Modelling of annular piezoelectric motors, 2015
https://www.researchgate.net/publication/229020084_Modelling_of_annular_piezoelectric_motors
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.