 David Brown
David BrownRunning a test with EasyDriver stepper controllers coupled with L298N H-bridge units has shown that this is not the best solution. Principally as it provides no current control when operating larger motors through the L298N units. And burn up significant amounts of power as heat, in both motor and driver.
To this end i've found the DRV8880 stepper controller that is capable of 2A (1.4A rms) per phase, and that has current control, the ability to control the torque, and as a bonus 1/16th resolution. I've put together a board using a pair of drivers with an MCP23S17SS SPI I/O expander.
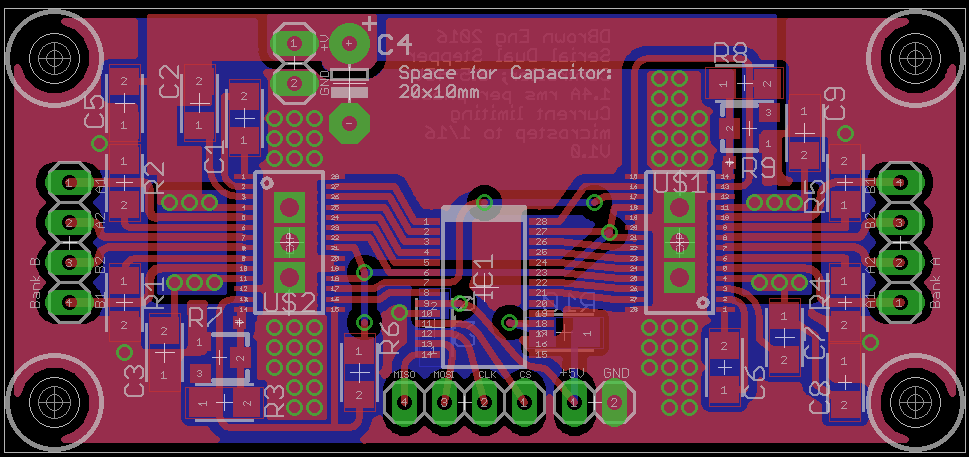
In order to utilise this with my rPiZero a new version of the breakout board is needed that frees up the SPI lines. The resulting board is half the size as the previous version, as it does not need space for the EasyDriver units. The new rPiZero board also incorporates an EEPROM to store the settings data for the I/O pins. As per the Raspberry Pi HAT standard.

Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
These are done in basic Eagle CAD - drag a corner with the miter tool set to round rather than straight.
Are you sure? yes | no