 ken.do
ken.do2. Assemble the 'hip' sections
Two identical hip sections are placed together 90 degrees from each other.
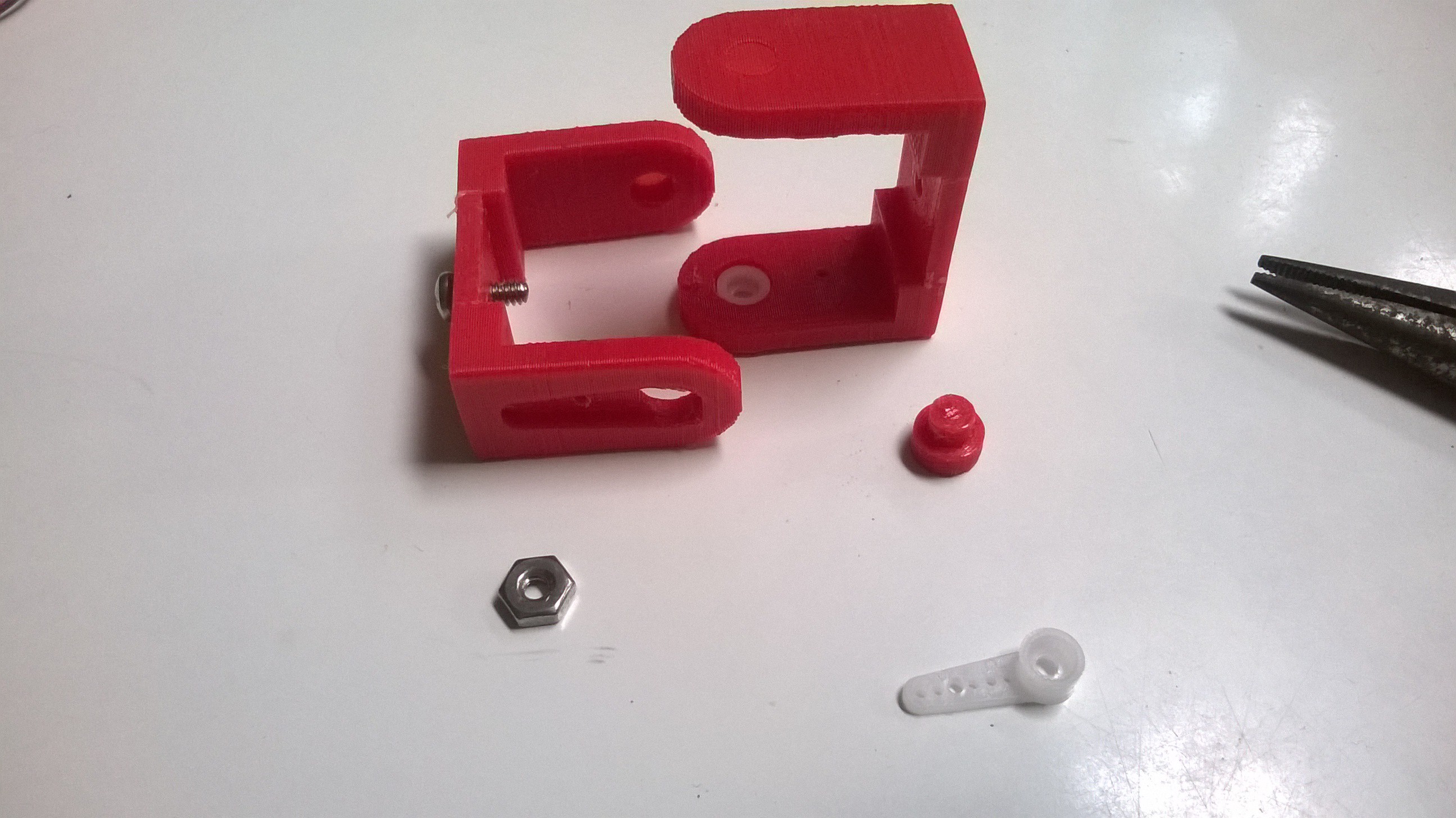

Attach them through the center hole with a 4mm x 1/2 inch-ish machine screw and nut.
A project log for 18 DOF High-Flotation Hexapod Robot
Six legs, 18 servos, with optional high-flotation mode. My first project that combined robotics and 3D printing.
2. Assemble the 'hip' sections
Two identical hip sections are placed together 90 degrees from each other.
Attach them through the center hole with a 4mm x 1/2 inch-ish machine screw and nut.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.