 ken.do
ken.do4. Assemble mid leg pieces
Again, insert servo bottoms (both at once) into the receptacles on the mid leg piece, being careful to avoid pinching the control wires. Then place and secure the other half using either zip ties or screws.

A project log for 18 DOF High-Flotation Hexapod Robot
Six legs, 18 servos, with optional high-flotation mode. My first project that combined robotics and 3D printing.
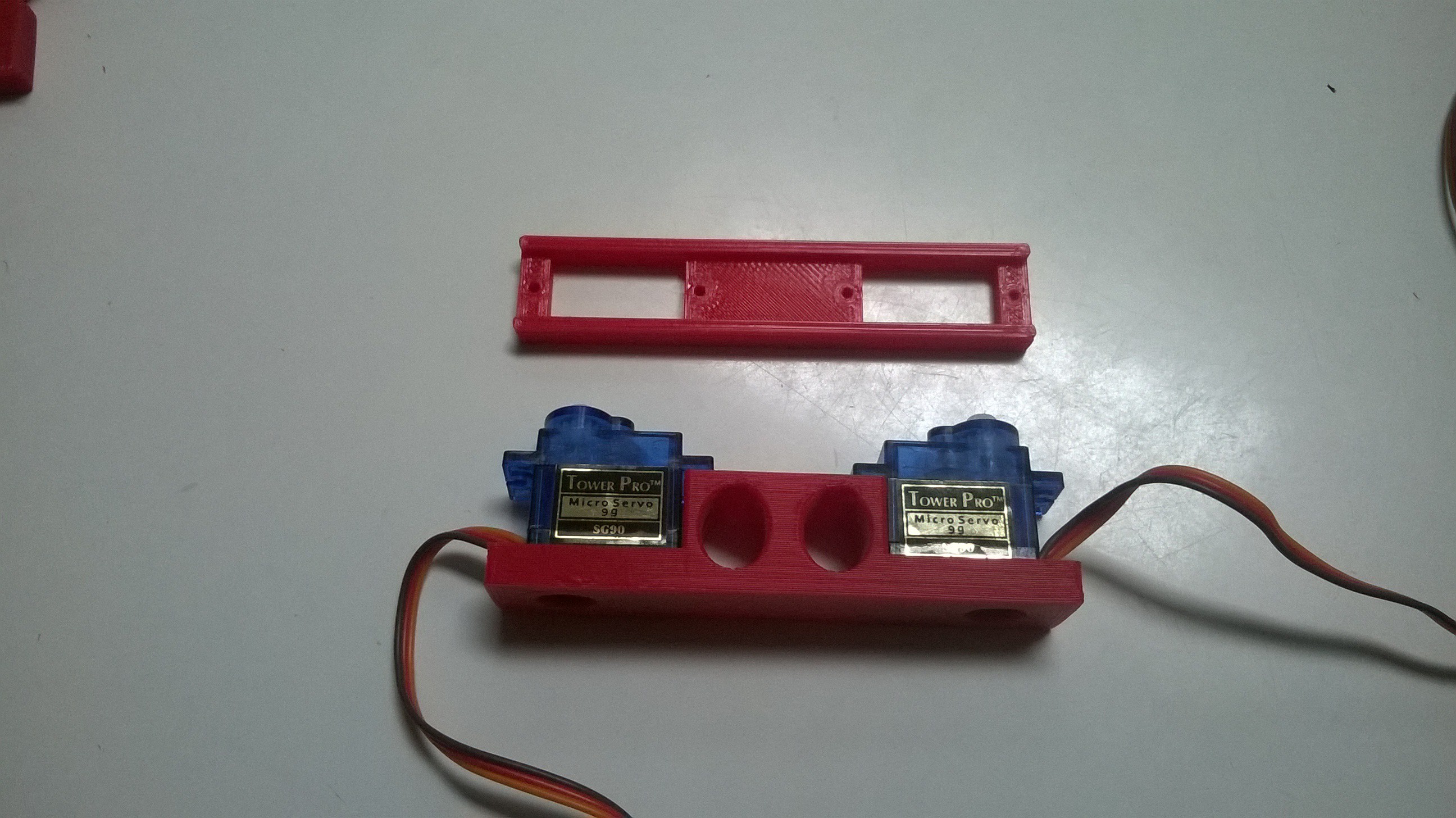
4. Assemble mid leg pieces
Again, insert servo bottoms (both at once) into the receptacles on the mid leg piece, being careful to avoid pinching the control wires. Then place and secure the other half using either zip ties or screws.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.