0%
0%
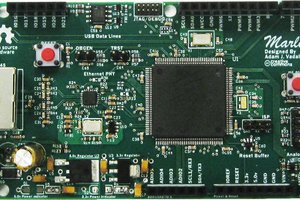
Swarm Bots: Assembly and Co-operative Transport
Swarm-bots is composed of number of similar bots, called s-bots, . The Swarm-bot is provided with self-assembling capabilities.
 Dhiraj Gehlot
Dhiraj GehlotBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests

 AVR
AVR
 James Lott
James Lott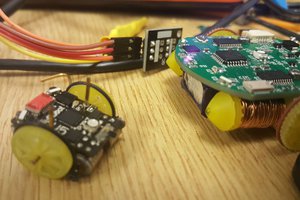
 Joshua Elsdon
Joshua Elsdon
 deʃhipu
deʃhipu
Can you help me do this?