 Mike Rigsby
Mike RigsbyI've named this "human detection" method the "Connor Nishijima Effect." My old method--stop the robot, wait a few seconds for the PIR sensor to settle, then check the PIR sensor for activitiy--is not great. Motion detectors detect motion and a moving robot sees everything as motion.
I rigged up an Arduino, twisted wire and a speech module to test the system (Arduino file is available in this project as "Antenna test.")
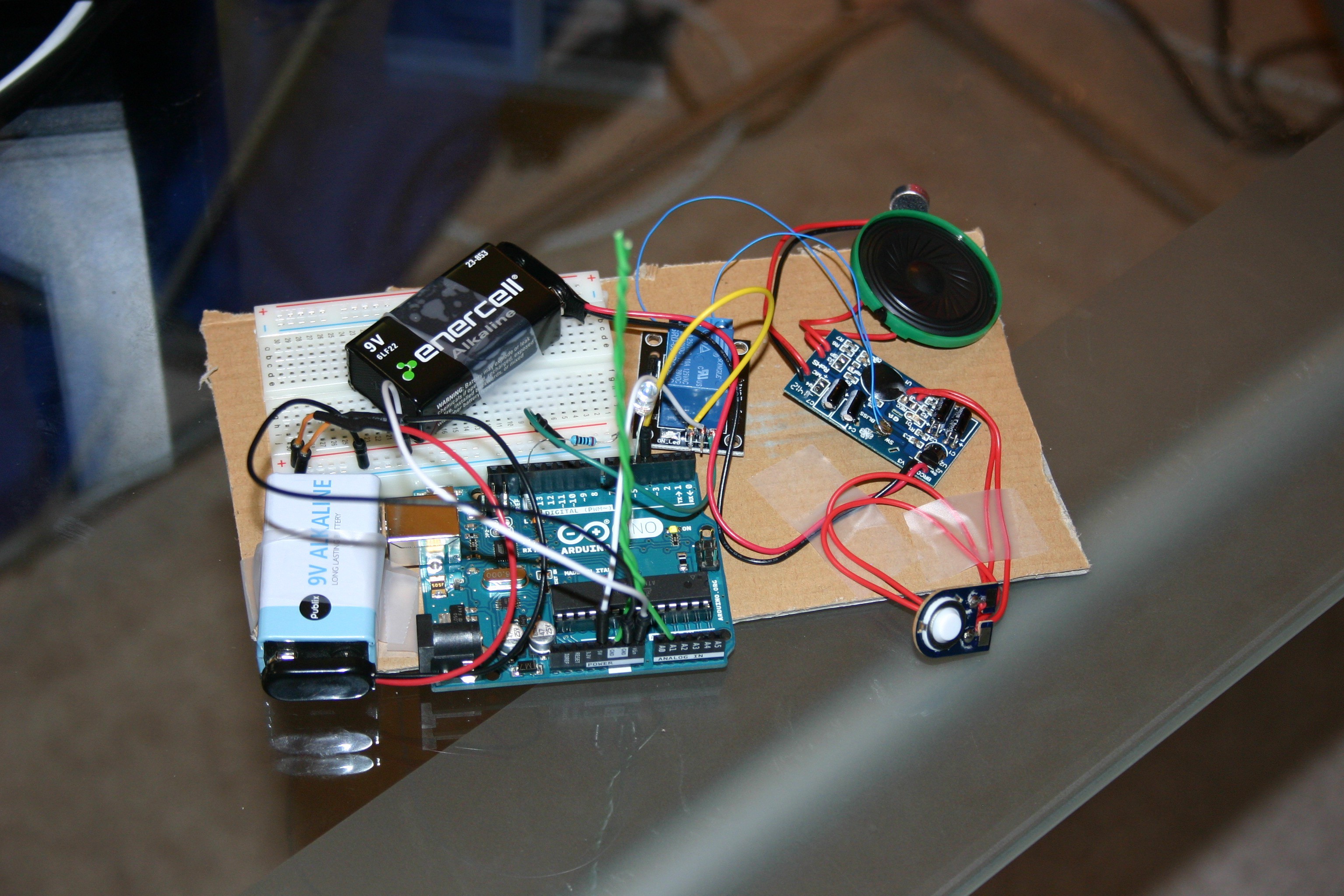
It worked well in a stationary position, but I wondered what would happen if it were moving. I taped it to a piece of cardboard, then taped the cardboard to the top of Mato.
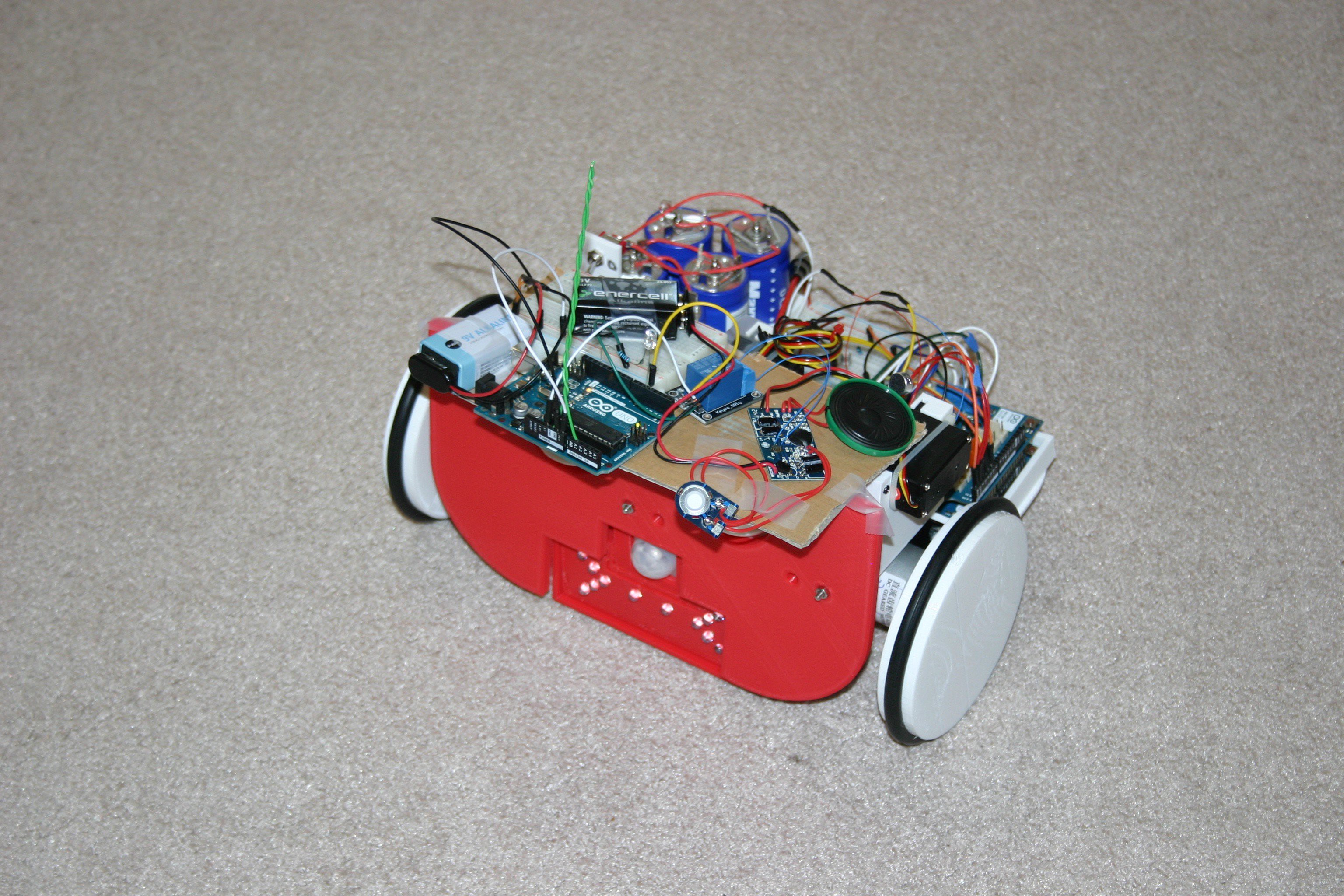
Next, I let it run and approached Mato. The speech module fired when I approached--and only when I approached--Hooray!
The tests are crude and this is early in the game--but it looks promising!
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.