 M. Bindhammer
M. BindhammerThis log starts with the so called circumplex model of affect. Re-drawn and simplified model:
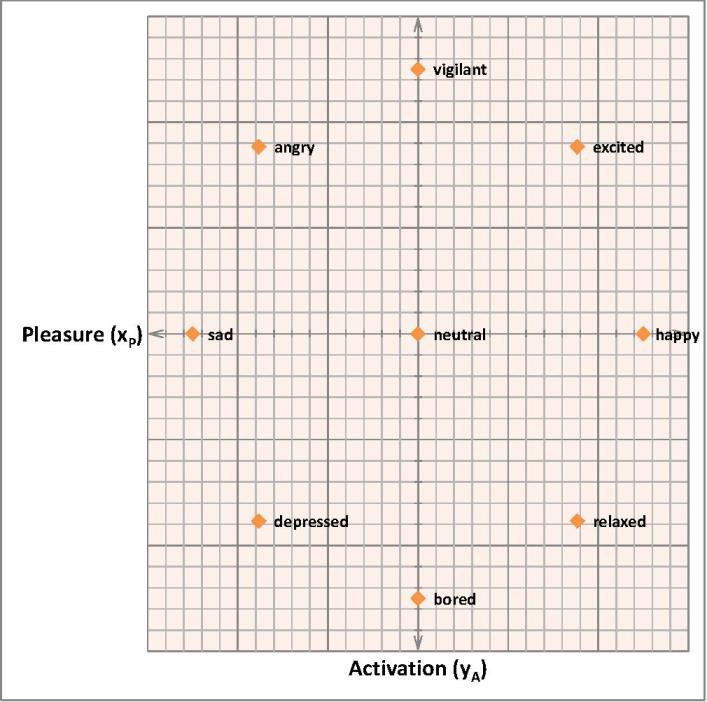
You might notice, that this model implicates the use of the KNN algorithm immediately. More formally: let the sample space be a 2-dimensional Euclidean space IR², the center coordinates (0,0) and the radius r ∈ IR > 0, then our classes are located at:
and
A remark about Pleasure and Activation before we continue: Activation could
be seen as a kind of entropy of the robot in a physical sense,
depending for instance on the ambient light level and temperature. Pleasure could be seen as a success rate of a given task the robot has to fulfill or to learn.
The distance between two points in a 2-dimensional Euclidean space is given by
which follows directly from the Pythagorean theorem.
With the defined boundaries we get a maximum distance between a class point and a new sample point of:
Here is a little sketch I wrote to demonstrate how the emotional agent works:
const float r = 5.0;
void setup() {
Serial.begin(9600);
Emotional_agent(5, 0);
}
void loop() {
}
void Emotional_agent(float x_P, float y_A) {
if(x_P < - r) x_P = - r; // limit the range of x_P and y_A
else if(x_P > r) x_P = r;
if(y_A < - r) y_A = - r;
else if(y_A > r) y_A = r;
float emotion_coordinates[2][9] = {
{0.0, 0.0, r, - r, 0.0, r/sqrt(2.0), - r/sqrt(2.0), r/sqrt(2.0), - r/sqrt(2.0)}, // x-coordinate of training samples
{0.0, r, 0.0, 0.0, -r, r/sqrt(2.0), r/sqrt(2.0), - r/sqrt(2.0), -r/sqrt(2.0)} // y- coordinate of training samples
};
char *emotions[] = {"neutral", "vigilant", "happy", "sad", "bored", "excited", "angry", "relaxed", "depressed"};
byte i_emotion;
byte closestEmotion;
float MaxDiff;
float MinDiff = sqrt(2.0) * r + r; //set MinDiff initially to maximum distance that can occure
for (i_emotion = 0; i_emotion < 9; i_emotion ++) {
// compute Euclidean distances
float Euclidian_distance = sqrt(pow((emotion_coordinates[0][i_emotion] - x_P),2.0) + pow((emotion_coordinates[1][i_emotion] - y_A),2.0));
MaxDiff = Euclidian_distance;
// find minimum distance
if (MaxDiff < MinDiff) {
MinDiff = MaxDiff;
closestEmotion = i_emotion;
}
}
Serial.println(emotions[closestEmotion]);
Serial.println("");
}
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
As far as I know the famous emotional robot 'Kismet' used a similar matrix. The robot can only express emotions mentioned in the matrix, using the KNN algorithm to find the closed match. I once wrote a little simulation where I used brightness and sound to manipulate the emotions of a virtual robot, see https://www.youtube.com/watch?v=e37p30Sybg8
Are you sure? yes | no
I am excited about this emotion matrix. I hope you will write more details later on, how a robot can express for example an emotion of (0.5r,0.5r).
What do you think to make the default/basic emotion somewhere around (0.7r,0.3r)? I prefer a robot which is most likely to be happy than neural. :)
Are you sure? yes | no