 Wudagem
Wudagem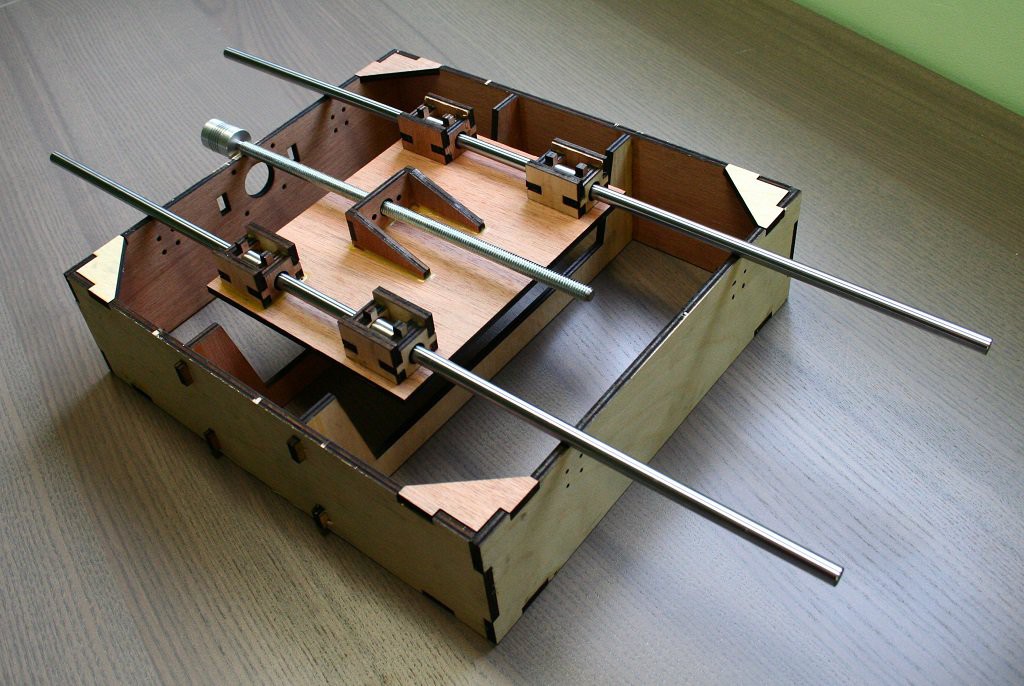
I cut the parts for the base and the main table and glued them together, as well as reduced the end of the threaded rod to fit into the flexible coupler. The next steps are to cut the linear rods to length, make an anti-backlash nut, mount the first stepper and get some basic electronics going to drive it. Then I can test the quality of the movement on the base table and see if any design revisions need to be made.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.