0%
0%
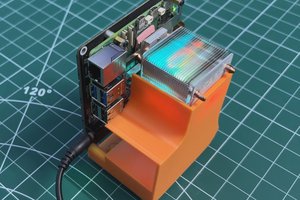
MINI-Zee: a $100 DIY smart drone with the Pi Zero
I finally received my Raspberry Pi Zero, just in time to get into the DIY challenge of building a smart drone with the Pi Zero and APM unde
 patrickpoirier51
patrickpoirier51Become a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests


 Arnov Sharma
Arnov Sharma
 julien
julien
{kind=link}
Do you have the pfxmini firmware or do you know where i can download it since the website does not exist anymore. please