 Neil K. Sheridan
Neil K. SheridanOverview
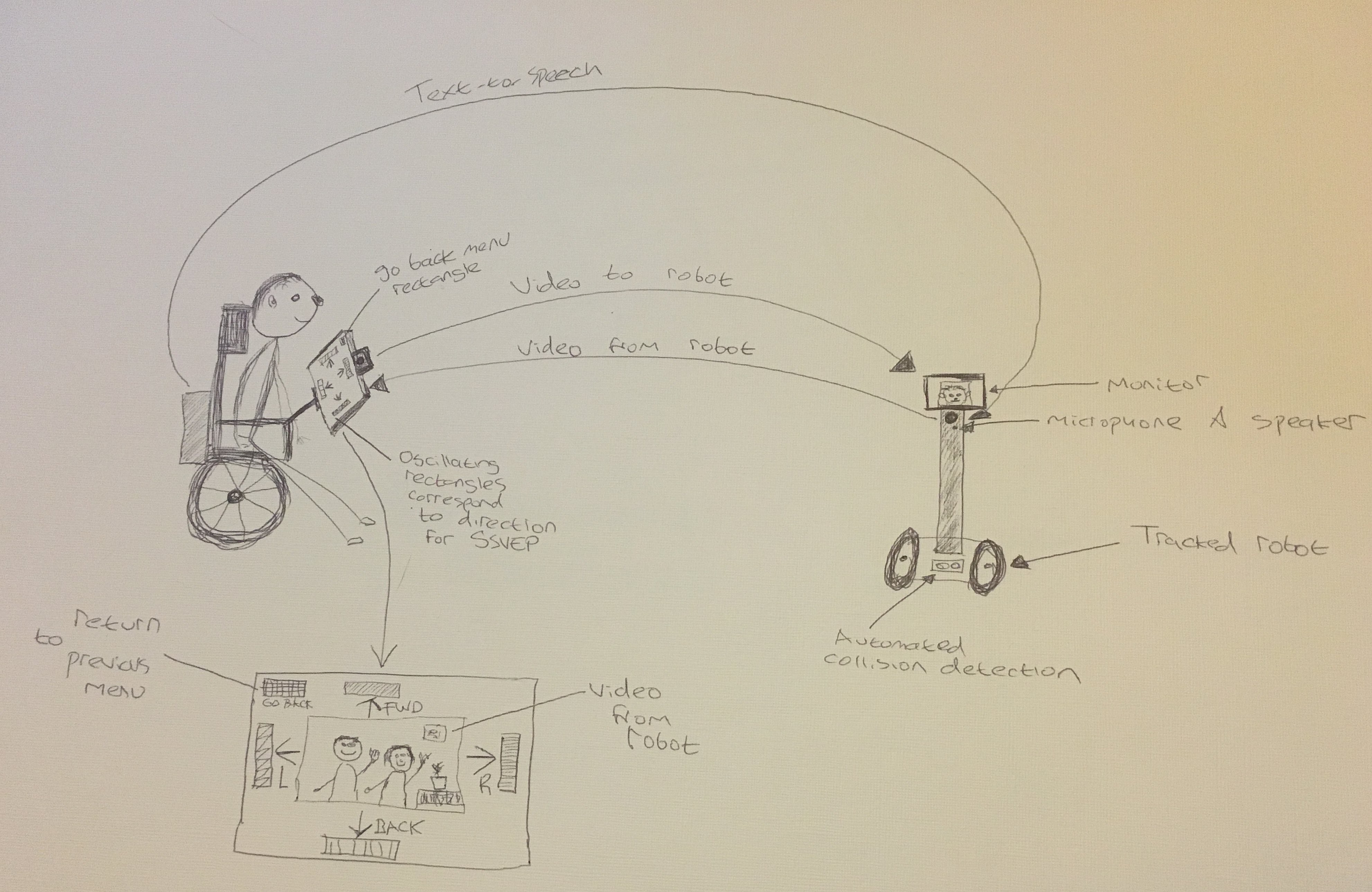
The robot-avatar will have data sent/received using TCP/IP. The data we will be sending/receiving will comprise: commands for motor control (forward, left, right, back, control nerf gun), streaming video & audio from control computer to robot-avatar, and streaming video & audio from robot-avatar to control computer. Text-to-speech will be done by the communication software module on control computer and sent as audio to the robot-avatar.
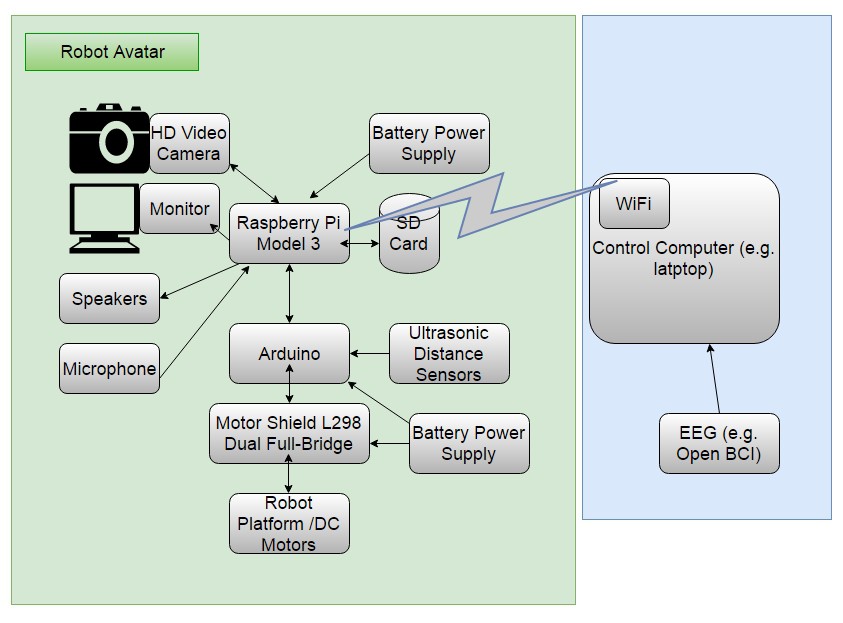
Outline of main parts required:
- Raspberry Pi Model 3
- Arduino
- H-Bridge Motor Shield for Arduino
- Robot platform with wheels and DC motors
- Raspberry Pi Camera (or another HD camera ->USB with microphone e.g. GoPro)
- Ultrasonic distance sensors
- Stereo Amplifier and speakers
- 24" LED HDMI monitor
Overview schematic for the Robot-Avatar
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.