 Jonathan Kelly
Jonathan KellyI thought I would add some older examples of how the system is used.
The short video is showing the older 'wired' version of the system being used to monitor accuracy and smoothness of a simple task - the request was 'lift an empty glass to your mouth as if you were going to drink from it'
the system recorded the movements using IMU sensors attached to the upper arm, forearm and back of the hand. It then generated a number of graphs of the motion.
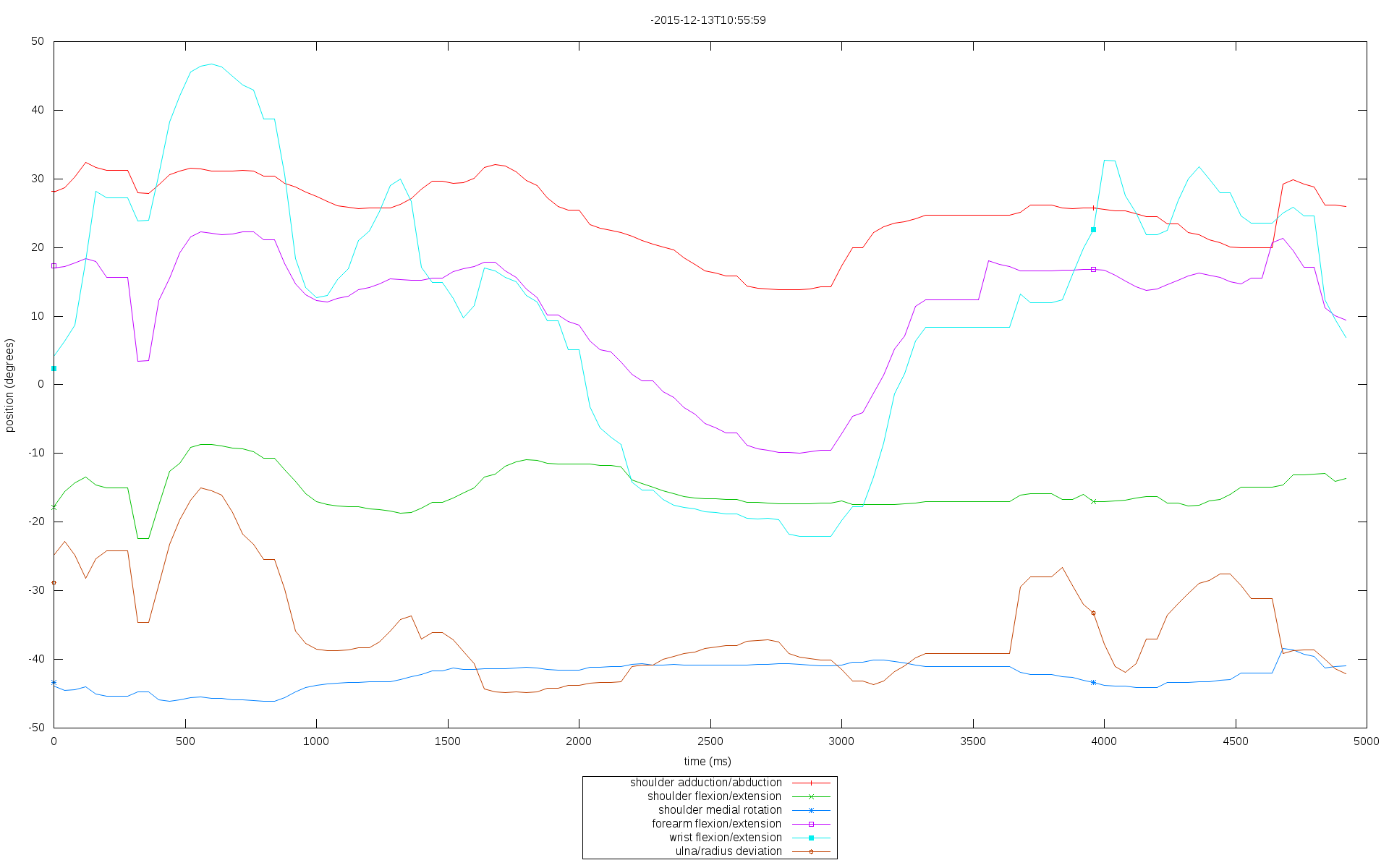
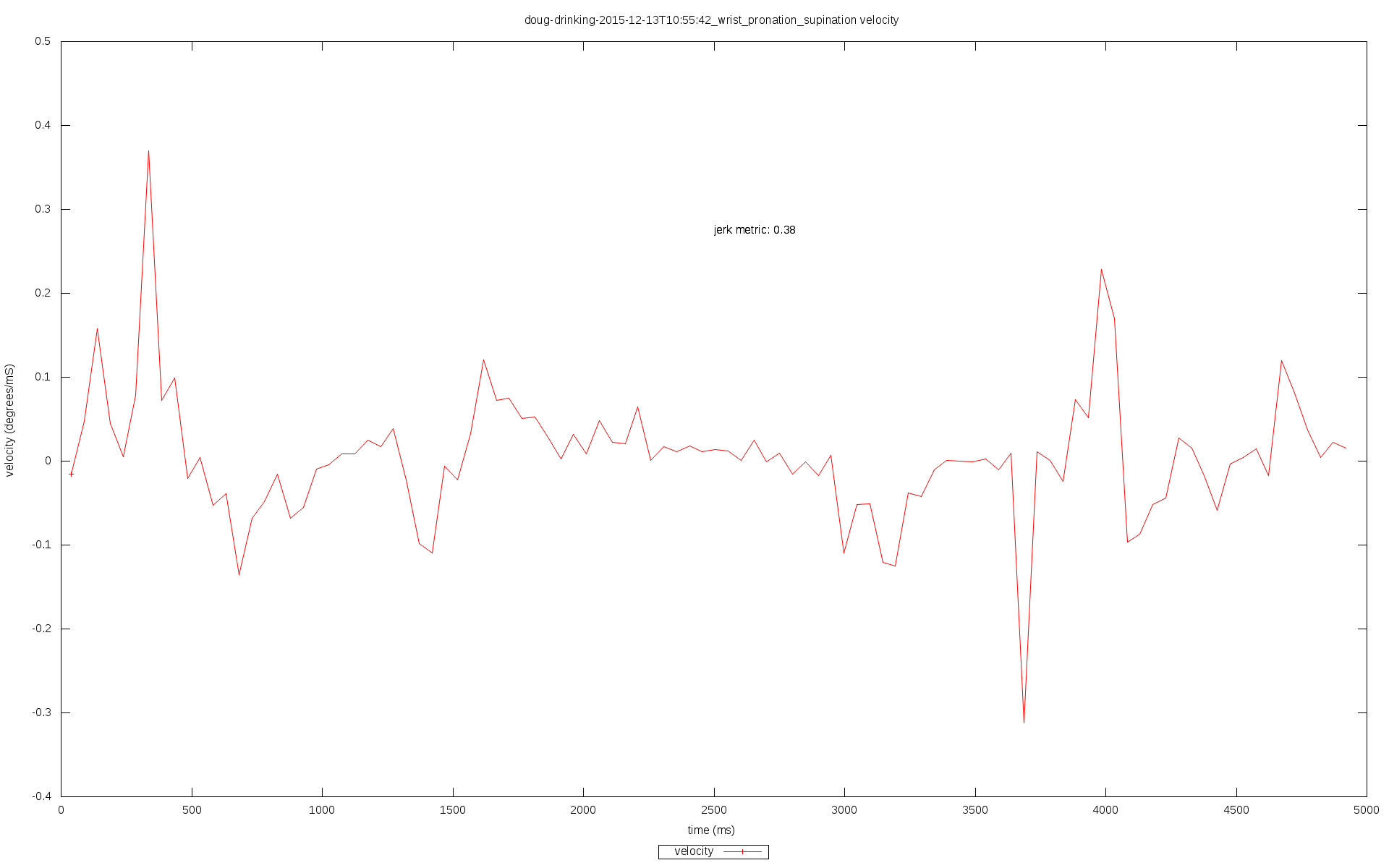
2 of the graphs of the above motion:
rotational position of a number of movement axes over time. Notice how the 'wobble' of his hand as he puts the glass back down in the video is reflected in the graph - particularly the wrist flexion/extension and ulna/radius deviation.
angular velocity of wrist pronation/supination
This excerpt was from a trial done last year looking at the effect of the drug Baclofen on his dystonic movements.
The above session was done using the first incarnation of the system using IMU sensors all physically connected by wires to a Raspberry Pi that was worn on the body that queried each of the sensors for their raw data, crunched that raw data from each of the sensors into a suitable form and passed the calculated orientations to the User Interface.
In the new 'Biot' system currently being worked on, each sensor operates standalone and does the processing of its orientation itself and sends that calculated data wirelessly to wherever it needs to be displayed and recorded.
It should hopefully be lighter, a lot easier to connect and configure and should scale better for operation with many sensors.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.