 Ranarchy
RanarchyJust completed a PCB design for driving one leg of the BuckBot uses a PCA9533 LED Driver to provide four PWM signals to (up to) four servos on each articulated leg.
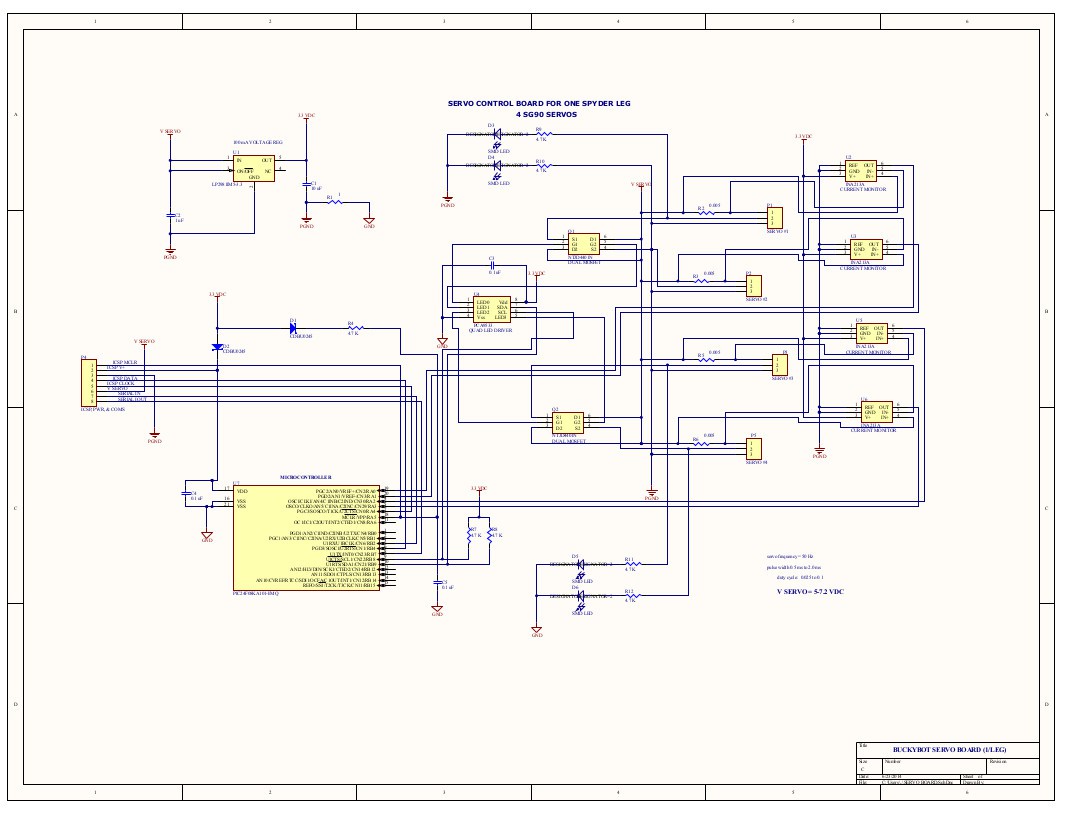
Boards on the way from OSHPark. The LED Driver talks to a PIC microcontoller over the I2C bus. Servo positions are, therefore updated digitally. A single sequence of 8-bit words moves the whole leg through its paces. Link to view the pdf is: http://www.ranarchy.org/SERVO_BOARD.html
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.