 jcchurch
jcchurchNew prototypes just arrived!
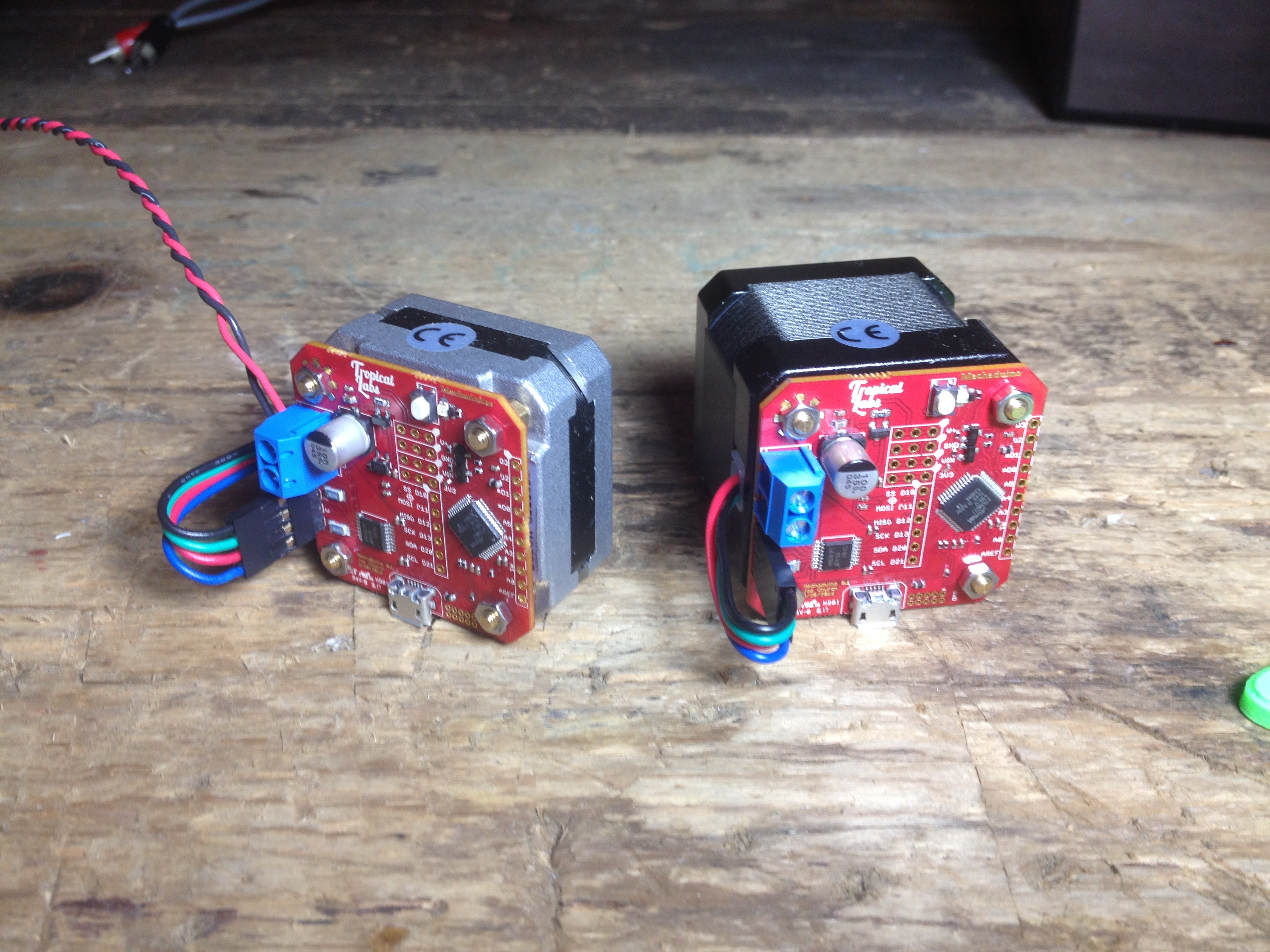
This version features hardwired connections to the motor driver and encoder (no more jumpers!), fewer through-hole components (only connectors), 5V compatible level shifters on D0 and D1, and a more thoughtful board layout. The new boards are slightly smaller, and do not overhang the edge of a NEMA 17 motor. We also arranged our power connections so that a 3 terminal 5V regulator (the classic 7805 or a modern switching equivalent), could be installed for single supply operation.
All the latest design files are on github!
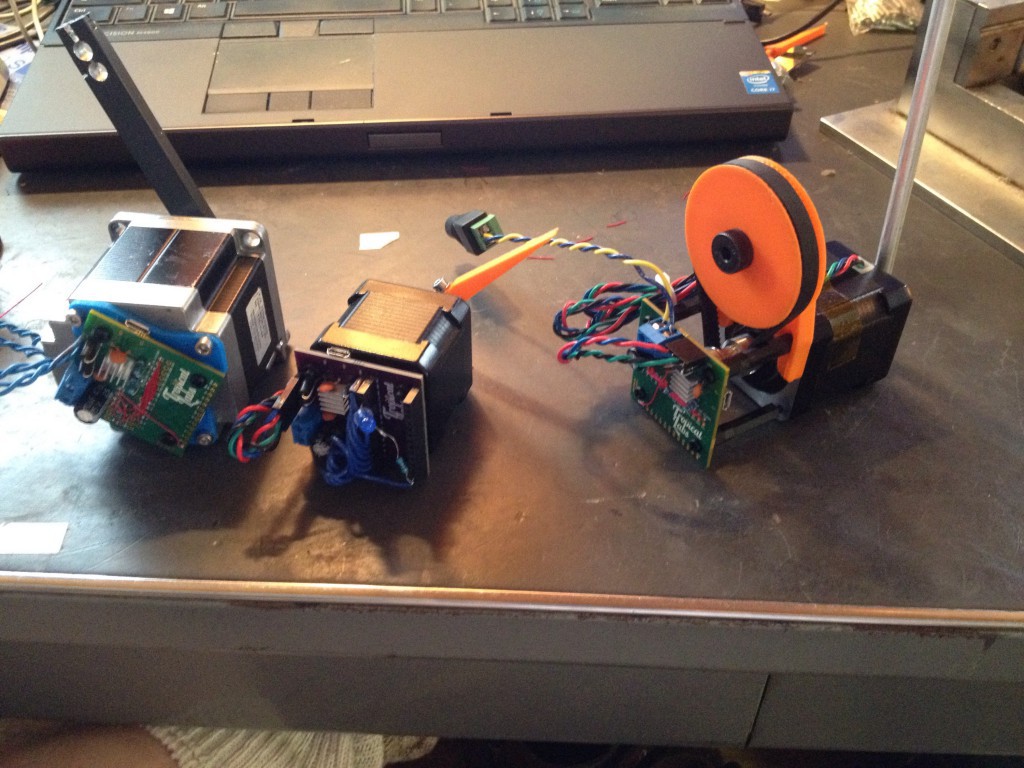
 Here's a photo of the older prototype boards (Mechaduino 0.0) wired up to a few different stepper motors including a NEMA 23:
Here's a photo of the older prototype boards (Mechaduino 0.0) wired up to a few different stepper motors including a NEMA 23:
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.