0%
0%
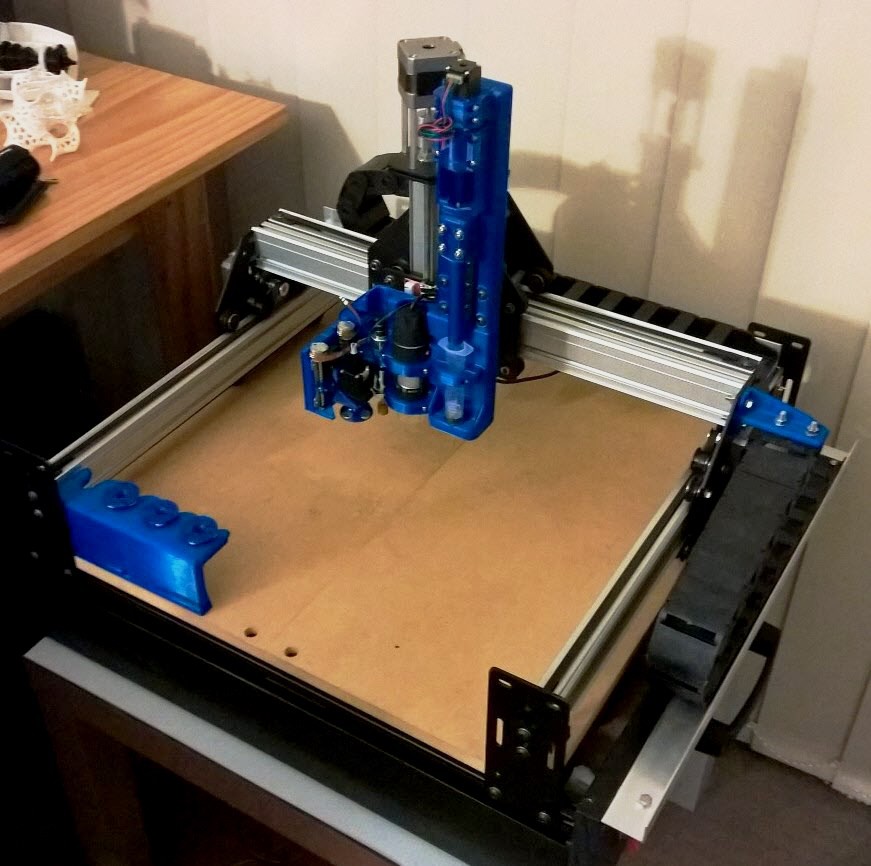
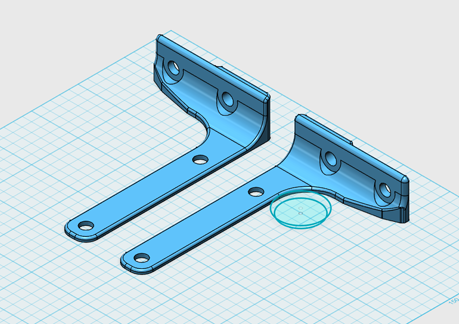
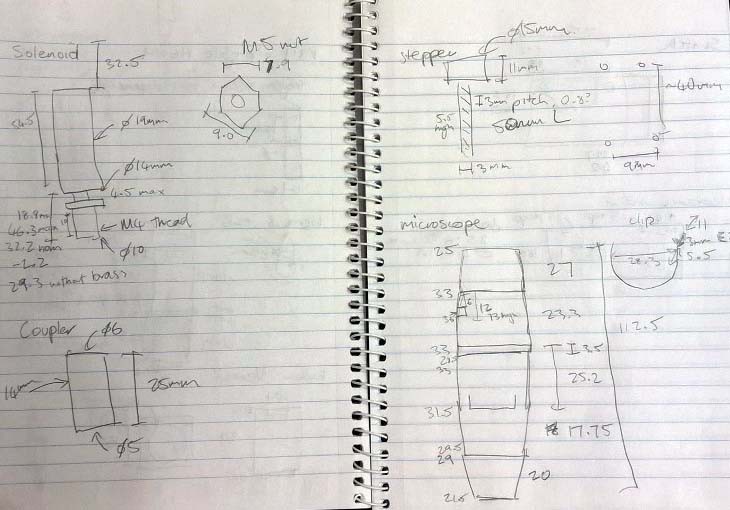
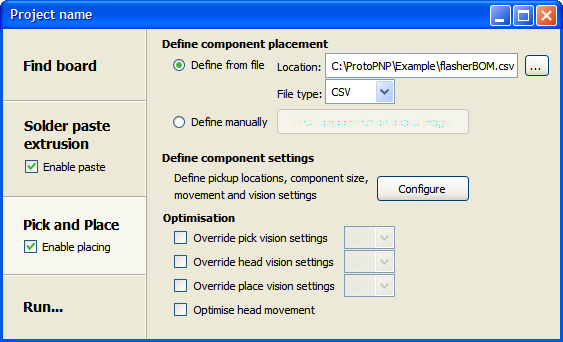
ProtoPnP
The goal: to make a Pick and Place machine that is small on cost but big on ability
 Alex
AlexBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests




 Vini's Lab
Vini's Lab
 Owen Trueblood
Owen Trueblood
 ZeptoBit
ZeptoBit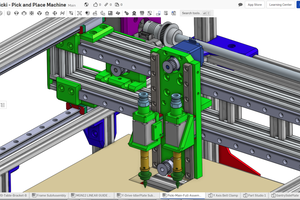
 AVR
AVR
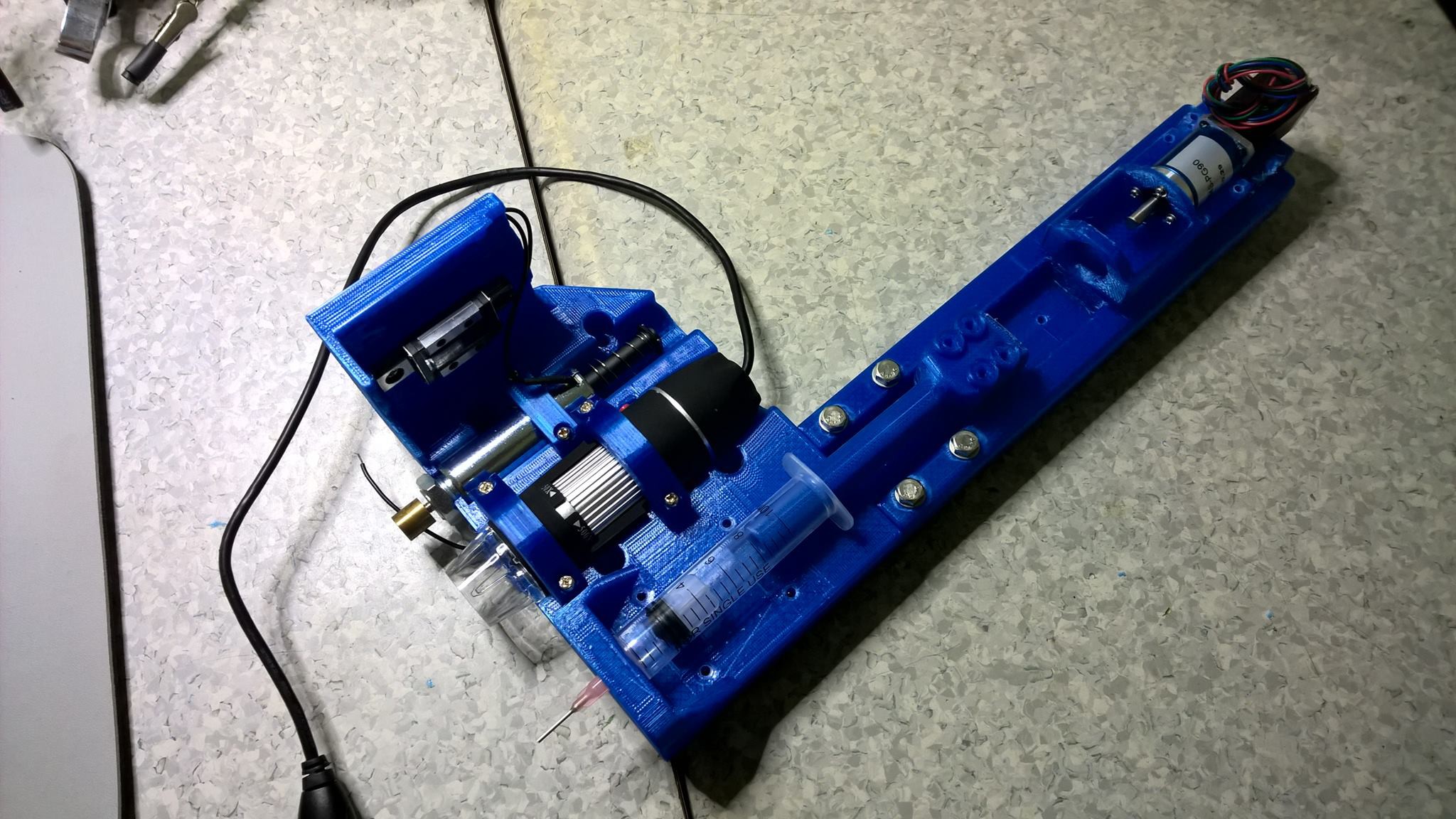
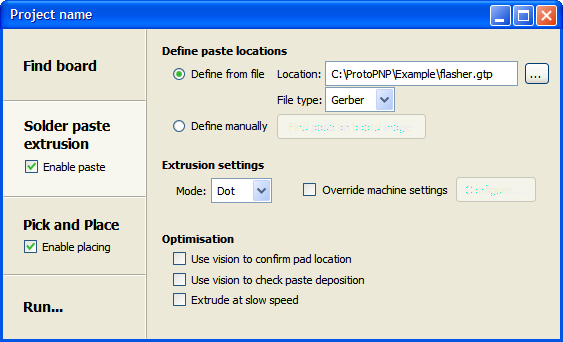
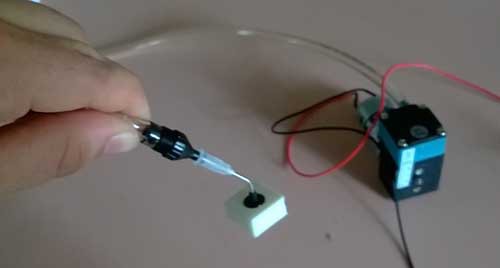
...drop the solder paste dispenser. Most everyone just buys a cheap stencil from OSHStencils and gets solder paste on to PCBs much quicker.