 Joshua Elsdon
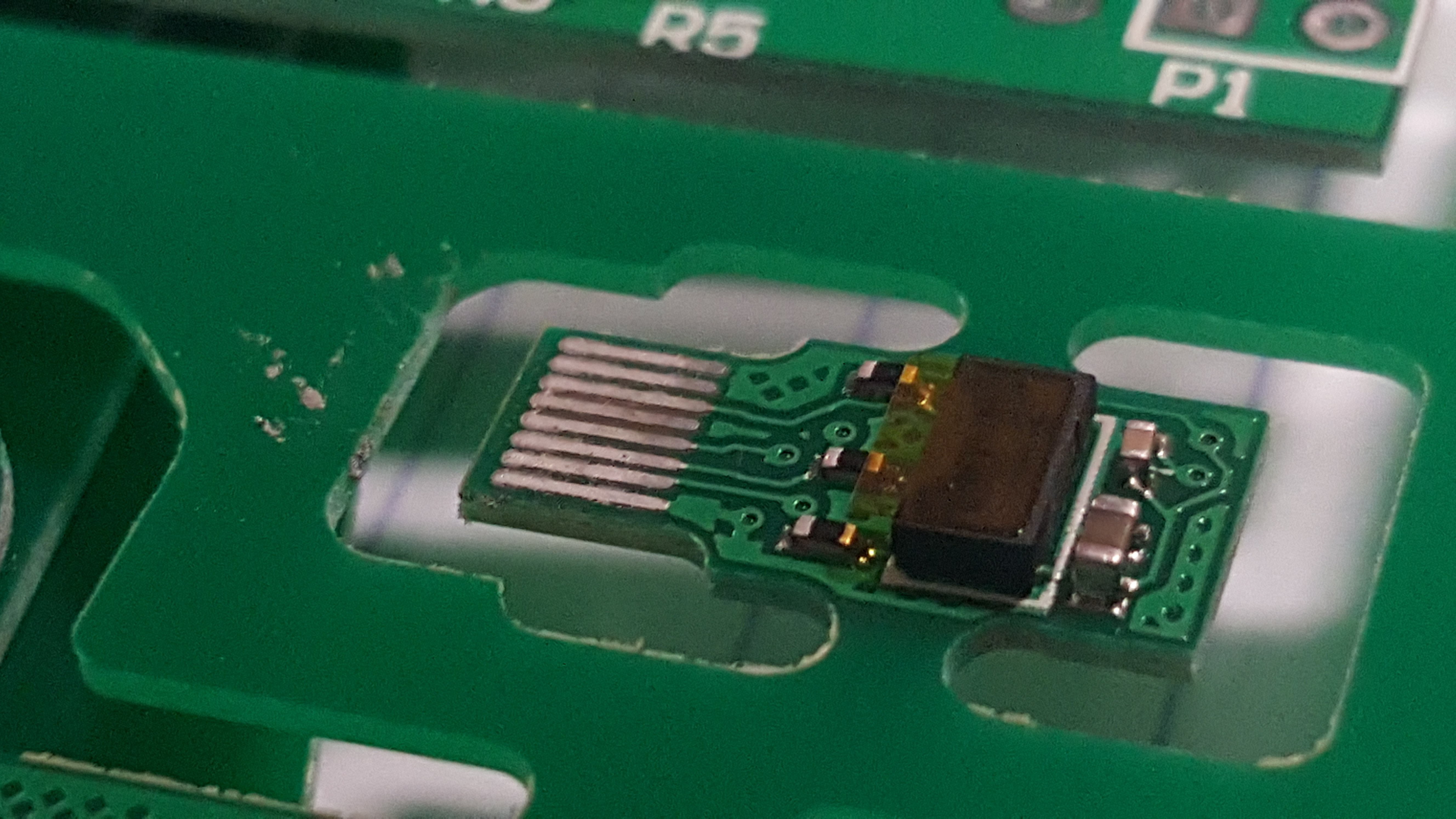
Joshua ElsdonAn update on the progress of the robot 'hat'. This is a TOF laser sensor that can be plugged into the programming port of the robots. With a range of ~2m, this can scan a circle of ~4m with just a quick spin of the robot. Will be made on flex PCB to integrate a 90 degree bend. Probably the smallest PCB I have ever made. Bring up on this board is not a priority, as there are core features that are still needed for the robot project, also debugging could be a pain, as these use up the debugging port. When you get used to the STM break point debugging, flashy LED debugging seems dreadfully inefficient.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
Especially since the library for those is pretty huge and complicated, it can take considerable work.
Are you sure? yes | no