 STEAL-THIS-HARDWARE
STEAL-THIS-HARDWAREHey folks enough with the obscure references to early 90s musical groups and on to the raw engineering of the project! Freedom Run is a motion control board geared towards the development of open source industrial robotics and/or any sort of robotic system.
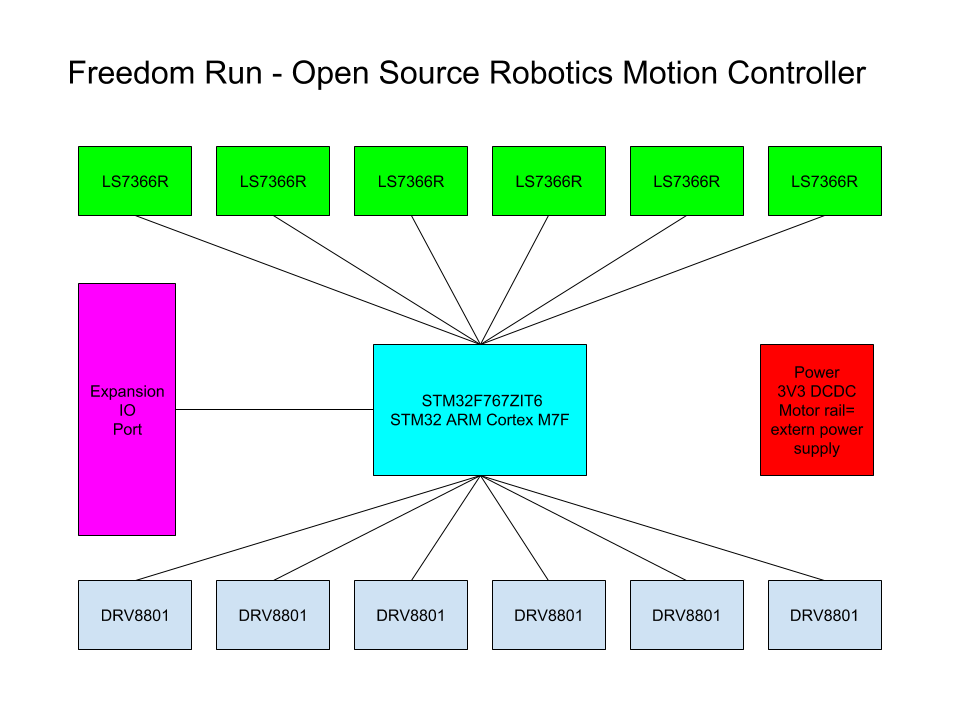
The main board will contain a processor and hardware for driving motors with closed loop control, an expansion port for daughter boards will provide interfaces for sensors and or application specific hardware. However the main board would be completely unable to interface with sensors, some serial ports, GPIO, and ADC inputs will be wired to connectors for some minimal sensor configurations.
The main processor powering Freedom Run will be an ARM Cortex M7F microcontroller from ST Microelectronics. The part I've selected is the STM32F767ZIT6, it provides a crazy amount of power per price coupled with the standard peripheral set most want in a microcontroller. I'm starting out with this particular chip because it is available on a ST Nucleo board, which can be used as a programmer and for developing firmware early on. Using a chip available on a Nucleo board also allows other people interested in the project to participate and try things out too.
Freedom Run will be able to drive up to 6 brushed DC motors with closed loop control in coordinated motion configurations. The Texas Instruments DRV8801 H-bridge IC will be used for motot control. the main board will contain 6 of them for the 6 motors. This chip was selected because it interfaces to micro-controllers in a simple way, can be cooled by the PCB passively without a heatsink, has a wide voltage range, and high current rating per phase.
For the closed loop control element of motor control Freedom Run will need to interface with encoders. To interface with encoders I've chosen the LS7366R encoder counter chip from LSI/CSI. Its a rather simple device that provides an SPI interface to a quadrature encoder, handling the sampling of quadrature signals, and completely keeps track of all count/quadrature data. The mainboard will contain 6 of these chips running in synchronization with eachother.
Here is the initial hardware breakdown of Freedom Run based on my component choices:
Thinking further about the Freedom Run board, the kinds of connectors I plan to use will be similar to the RepRap boards I worked on with Ultimachine, so expect phoenix contact heavy duty power connectors and molex clip connectors for everything else. All pitches will be 2.54mm or multiples of that.
With that, thats all I got for you guys today, happy Hackaday Prize season !!!!!!
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.