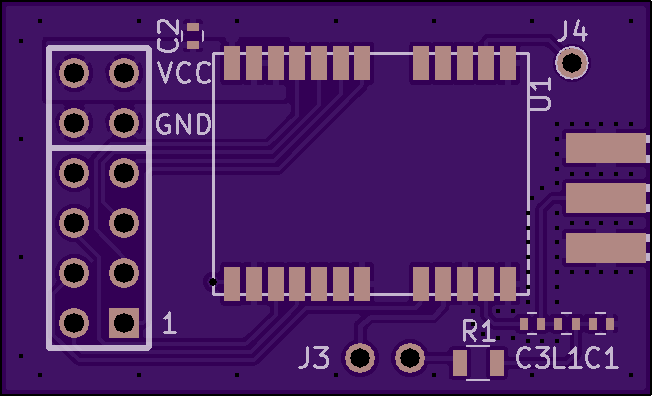
To jump start the HDL/software side of things, we're gonna use a Digilent Arty A7. Luckily, Digilent already has a PMOD board with the ST IMU and Barometer, so that's job done and in the mail. No such board existed for the GPS module, until about 3 hours ago when I finished one. It's a very simple board that connects the GPS module to a type 2A (extended SPI) PMOD. It was also a nice way to knock the rust off my PCB layout chops before I start working on the much more complicated main board.
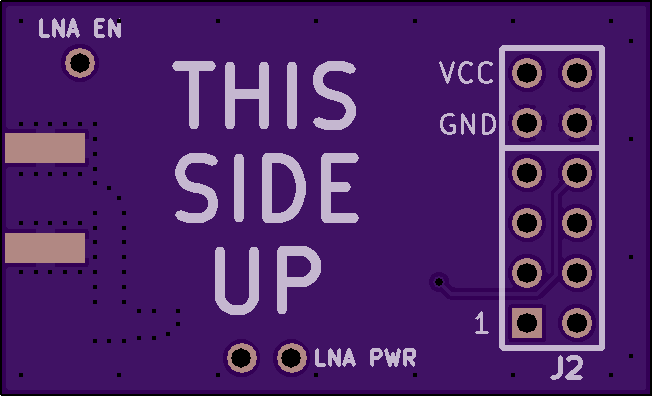
The module can power an active antenna, if the LNA POWER pins are shorted, or an external power supply can be connected through the LNA POWER pin closer to the sma connector. The LNA EN pin is an output to enable an external LNA. If you use a passive antenna, only C2 and C3 are required, the other passives can be omitted with no loss of function.
Pins 9 and 10 of the PMOD are connected to the Timepulse and Safeboot pins of the gps.
| ID | Value | Package | Notes |
| C1, C2 | 10 nF, 16V, 10% | 0402 | Decoupling caps for VIN and for active antenna power |
| C3 | 47 pF, 25V, 5% | 0402 | DC blocking cap for RF IN |
| R1 | 10 Ohm, >1/4 watt, 10 | 0805 | Active antenna bias resistor |
| L1 | 27 nH, 5% | 0402 | Blocks RF input from active antenna power supply |
- Caleb
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.