Little bit of backstory.
So, at my work (a high school) I was helping out a student with a rather peculiar robot.
(First and foremost he gave his permission for me to talk about and photograph it. He seemed happy at the though it inspired a staff member so much, so that's nice and out of the way.)
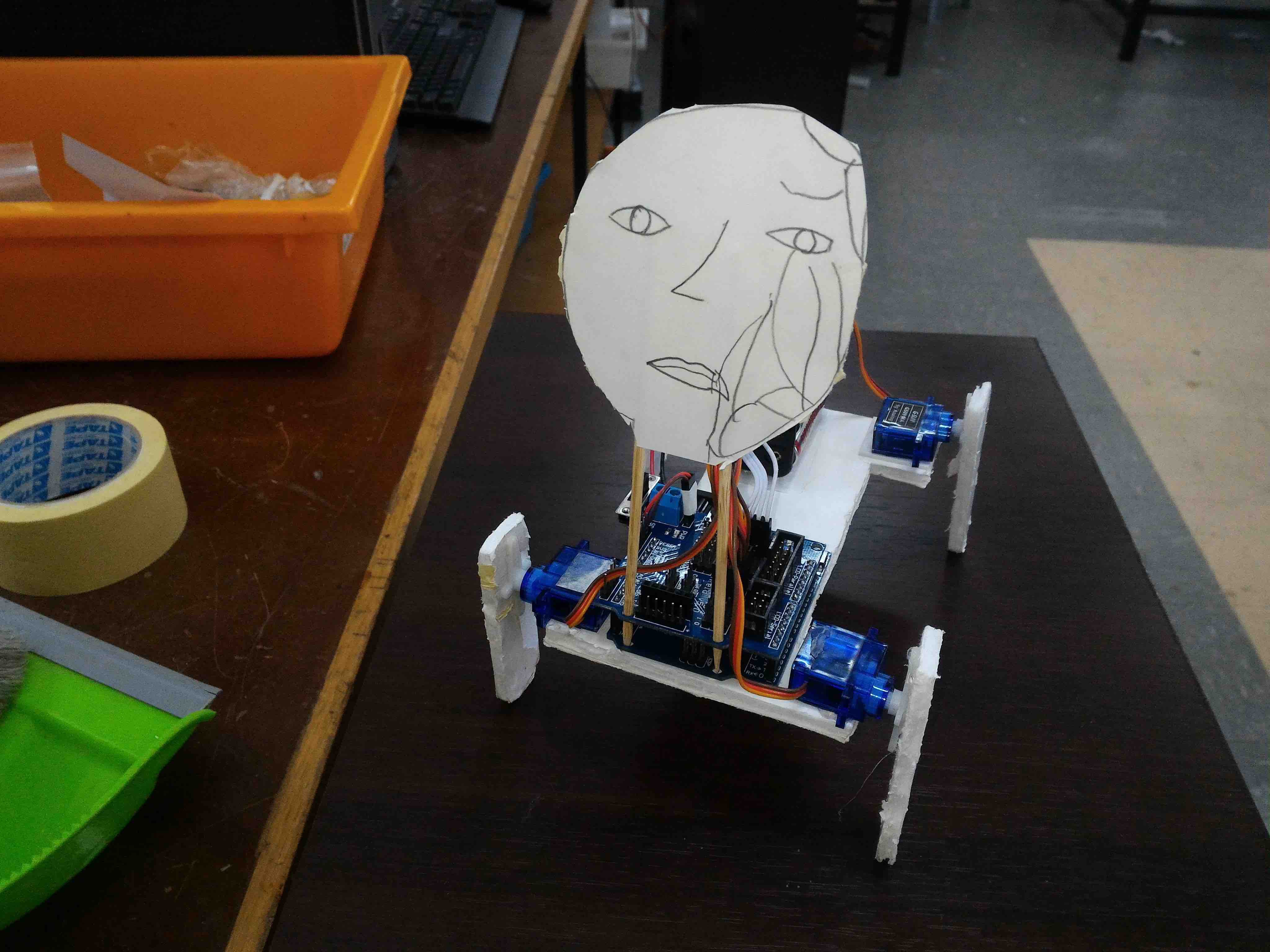
What drew me to this bot was it's utter simplicity, to the point where it doesn't look like it could function.
It is a sheet of foamboard with four servos hotgued on, and on each servo's horn a small cutout of foamboard for a leg.
No knees.
At first I saw this as an error, then I quickly realized it was an awesome challenge.
Despite the original not having knee joints, probably because of a lack of understanding on the students point, it was still able to shuffle around rather nicely, and, eventually, the student got it walking pretty well (if not while looking goofy as a drunk puppy), but that's for a later log.
(Insert "I have no [knees] and I must [something] joke here)
Anyway, so intrigued by the thought of getting a design like this working I ordered a bunch of servos to build one myself.
Ultimately, there are two questions this project asks:
What's the best way to get a robot with four servos, each connected to one and only one leg, to walk? As in you could take the robot above and load software onto it to get it walking, without modifying it physically.
Secondly, what's the best way to build a walking robot with only four servos?
The first is a nice thought experiment, really gets you thinking and testing, the second is a nice answer to the current pricing of robots.
The parts alone for a Poppy robot are over $10k. You can buy a pepper for under $2k. What's the fun in this? Sooner or later robots will just be flat featureless disks that scoot along our floors. Oh wait.
Anyway, I just think limiting the amount/quality of servos while maintaining the same controllable movement is a nice way to start off designing cheap legged robots.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.