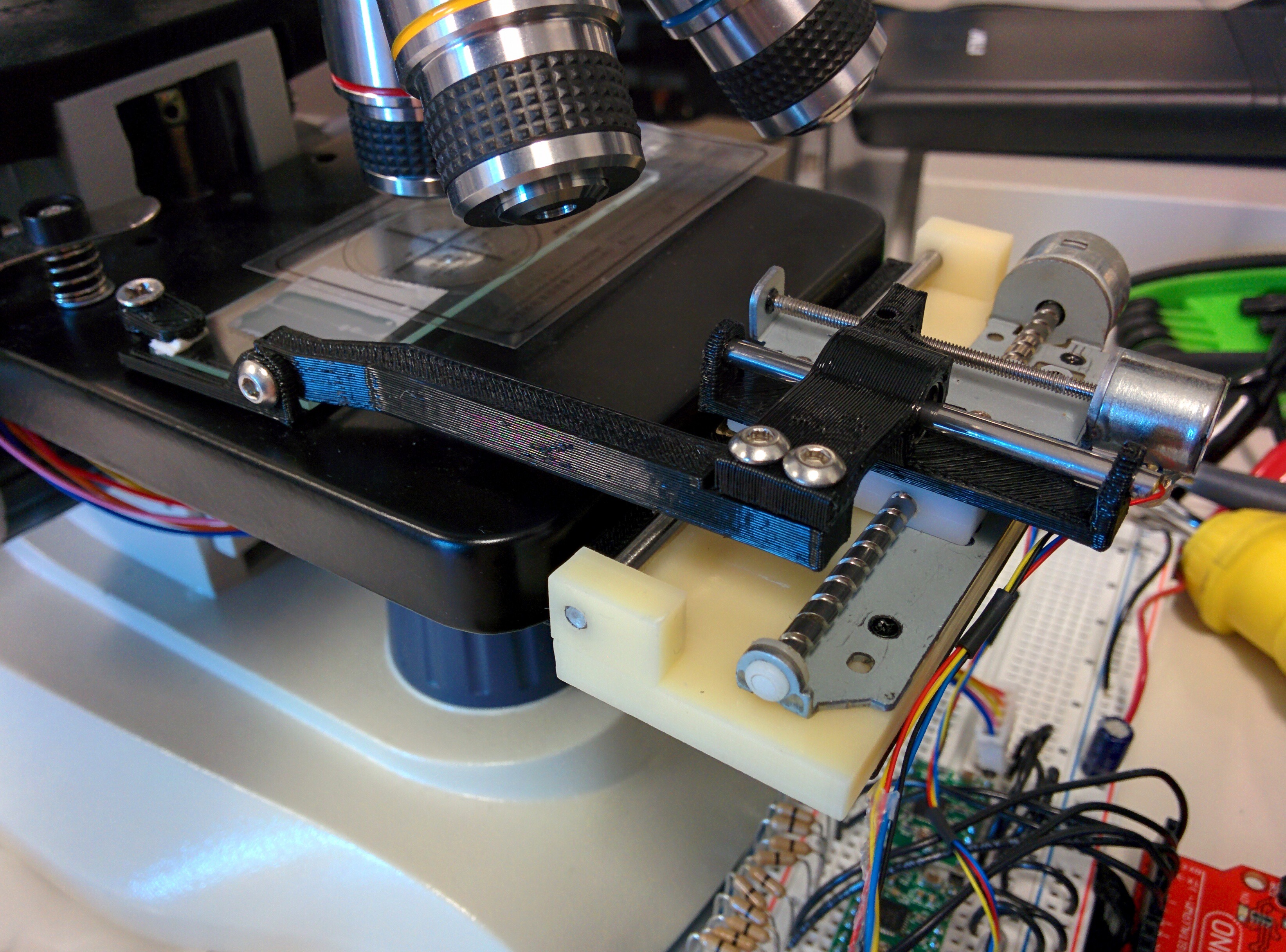
The WEM is all mechanically functional (at least well enough for V1). The X/Y positioner is mounted with the bracket printed last night and I modified the Y slide (via hot air gun) to de-warp it and lay the slide flat on the table. I also was able to calibrate both axes to "good enough" accuracy (<0.1mm per 20mm movement), with both axes having the following settings:
X-axis: 53.202 steps/mm, 8x microstepping
Y-axis: 50.333 steps/mm, full step
The Z-axis I'm leaving as is, since absolute distance doesn't have much bearing on it. Here's a photo of the final setup:
After calibrating both axes, I decided to give an "automated" panorama a shot using the phone's built in panorama feature. It didn't turn out so great, with some banding effects, and overall inaccuracy. I think I'll stick to moving the slide a fixed amount, stopping, taking a full size photo, then moving to the next position, and doing stitching as post-processing.
Here is a video compilation of the final state of the mechanical portion of the project:
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.