 Charles Fried
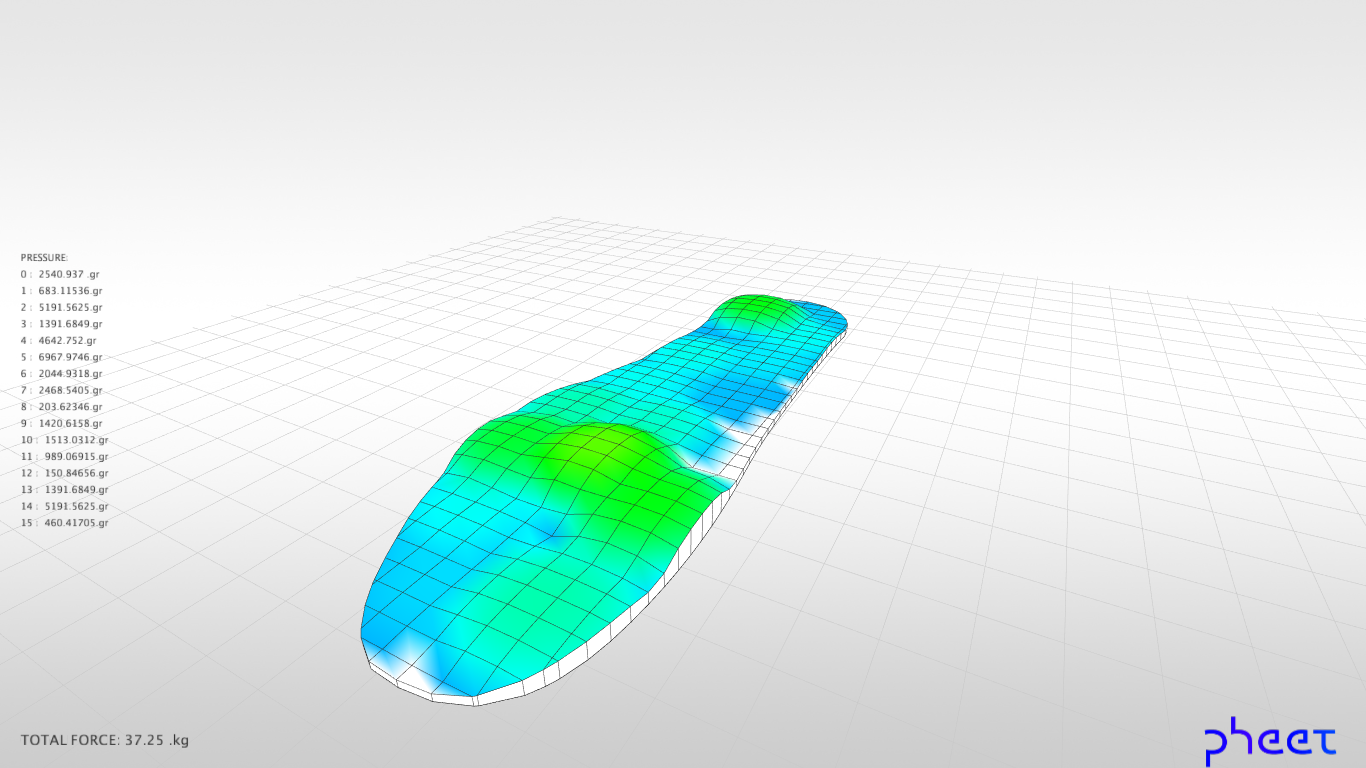
Charles FriedIn preparation for a presentation I thought I would spend a little more time visualising the data. It seemed like a nice idea to have the in-sole in 3D with the pressure mapped to the Z height.
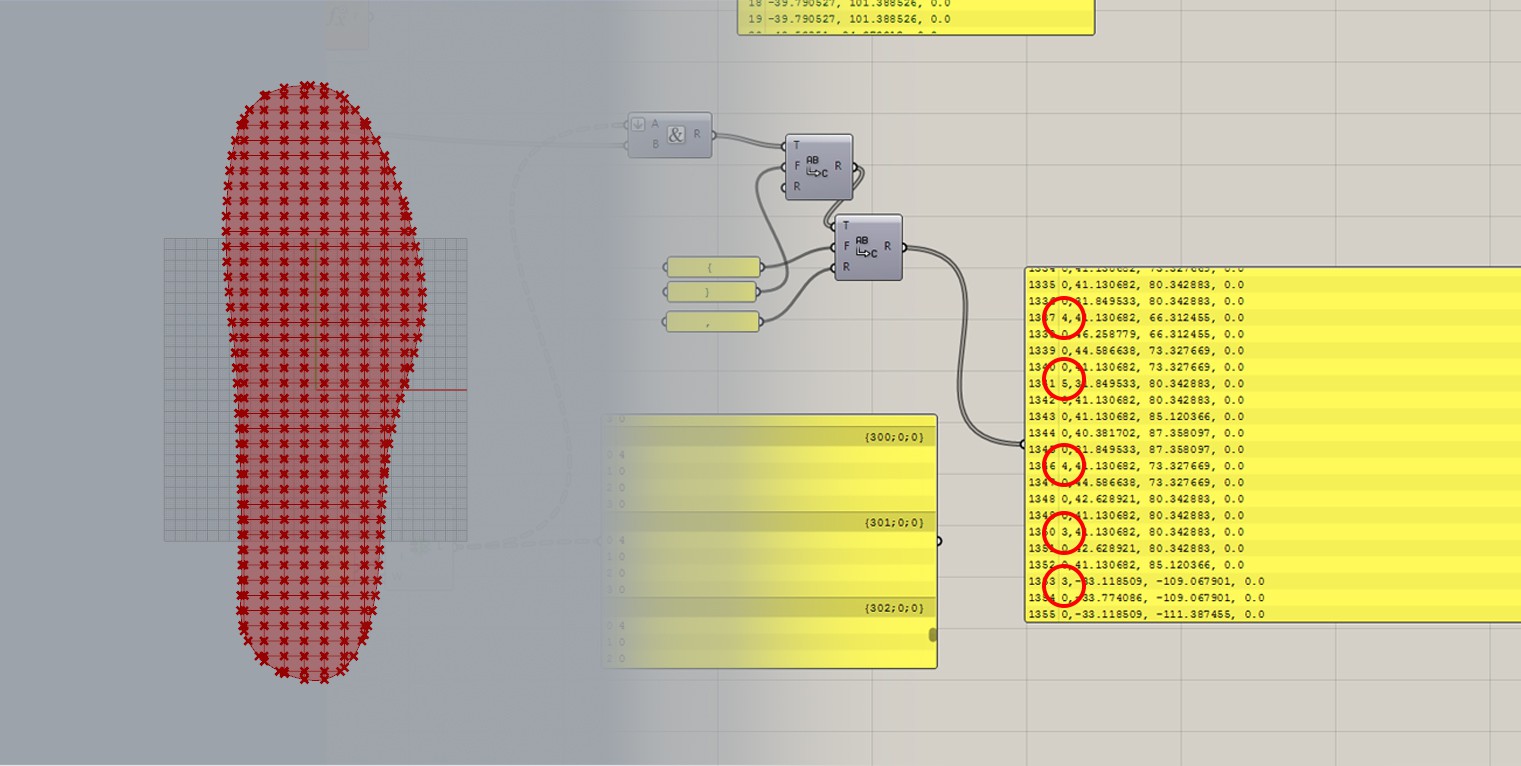
I started by modelling a mockup grid in grasshopper and exported the points as csv files which are easy to handle on the processing side. However because not every cell has four sides I had to find a way to 'embed' the tree structure in a csv, you can the number of side concatenated as the first variable in grasshopper circled in red.. Be sure to check the order of the points before exporting, I found that GH had somehow mixed them round.
In the previous log I described a process of interpolation on a pixel basis which turned out to be extremely inefficient, running at 8fps on mac book air. So I decided to split the shape into a grid and calculate the force only at the corners of each cell.
The gradient function stayed the same, by playing with the exponent (y) we can control the fall off. It's just a common remapping formula with an additional force scalar at the end. We also say that for any sensor we won't look beyond a certain distance, this is only for the purpose of visualisation so the exact absorbance 'radius' does not matter too much.
Float zHeight = (lowTo + ((distance^y) - lowFrom) * (highTo - lowTo)
/ (highFrom^y) - lowFrom) * force
The sketch now runs at smoothly at 45fps which leaves plenty of room for further calculations.
Todo list:
- Distribution through time
- Center of gravity
- Per Sensor time/pressure graph
- Sensor Calibration
- User Software Calibration
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.