 Luke
LukeOne of the information that needs to be collected by the system is launcher's orientation relative to Earth's magnetic field.
To achieve that I used HMC5883L magnetometer. Initially I mounted it inside main case, together with all the other electronics. It turned out to be a bad decision as the batteries distorted the magnetic field so much that it was impossible to calibrate the device.
Then I tried moving the compass to weather station's arm:
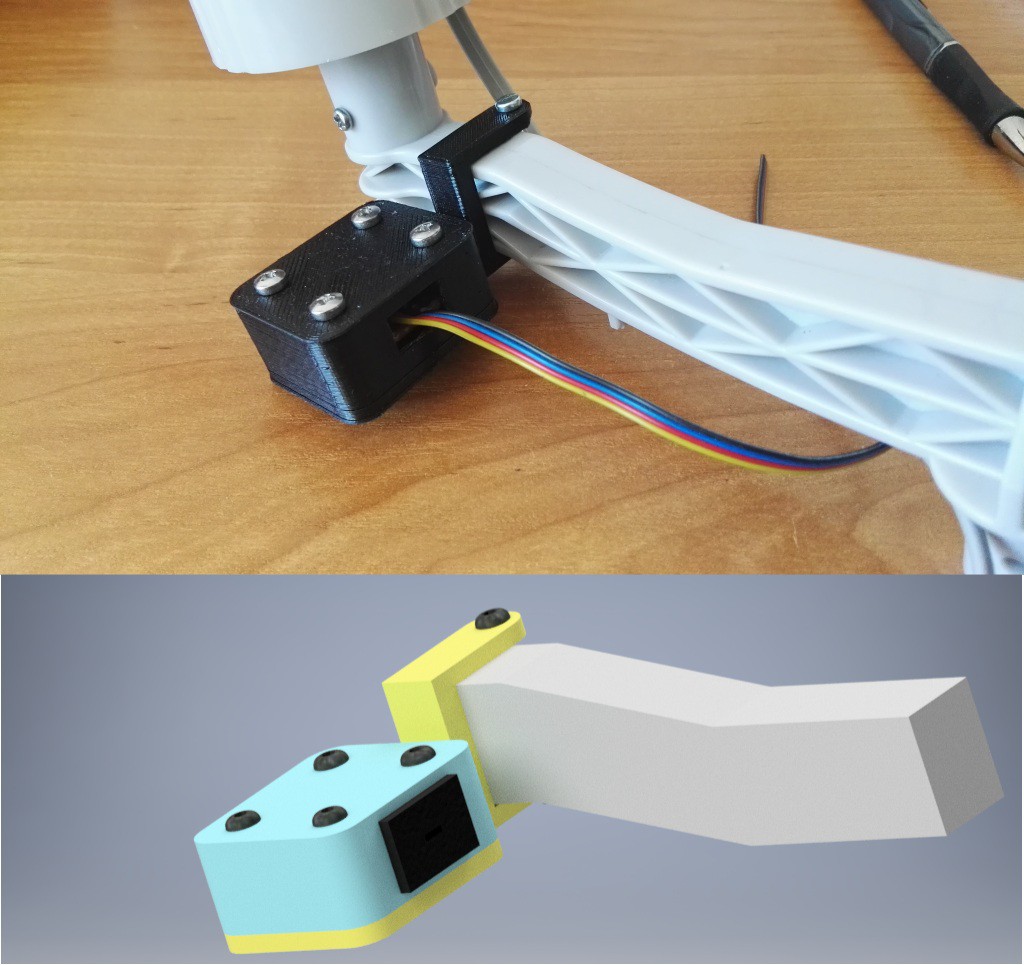 But I totally forgot about magnet inside anemoscope! It influences the readings as well. It's not possible to fully compensate for the magnetic field changes from the magent by calibrating the compass, as the magnet is moving when the wind direction changes.
But I totally forgot about magnet inside anemoscope! It influences the readings as well. It's not possible to fully compensate for the magnetic field changes from the magent by calibrating the compass, as the magnet is moving when the wind direction changes.
I'll have to move the compass away from the anemoscope and anemometer (which has a magnet built-in as well) - back to Inventor again.
BTW if anyone wondered what tools I use to calibrate the compass: http://diydrones.com/profiles/blogs/advanced-hard-and-soft-iron-magnetometer-calibration-for-dummies
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.