 ZaidPirwani
ZaidPirwaniAfter selecting motors, getting the motor drivers made, sensor PCbs and other stuff, came the task of getting or making the wheels, this has been one of the hardest thigns to do while making a robot as in Karachi - you cant just go to the radioshack (there isnt one) and buy wheels of the requried diameter/shaft measure etc. Nor is importing/buying form the online stores feasible.
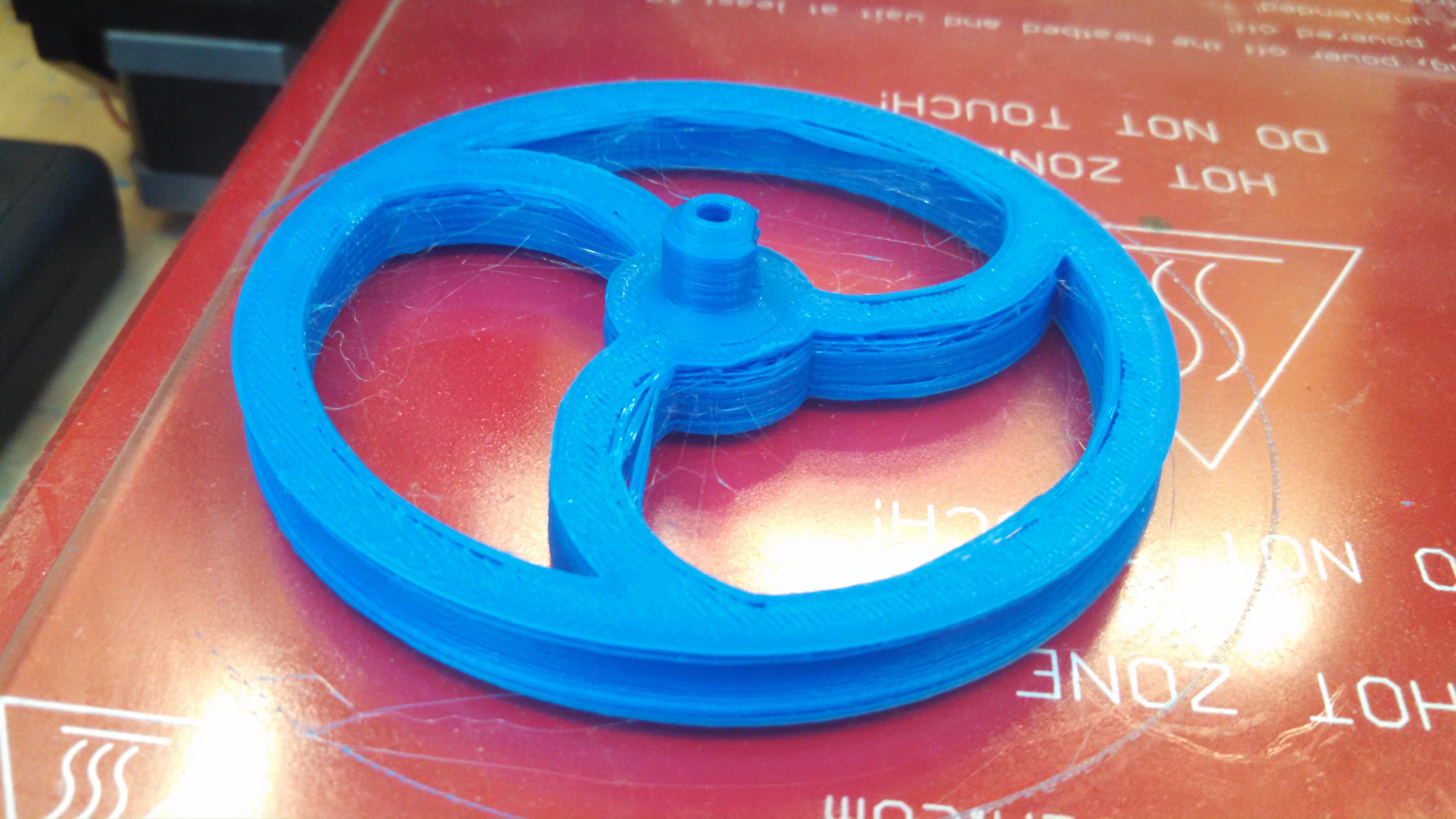
Luckily, I found this: http://www.thingiverse.com/thing:21486 the
Highly Configurable Wheel (One Wheel To Rule Them All)
Explanation Link: http://www.thefrankes.com/wp/?p=2674
This introduced me to the world of OpenSCAD and cause I recently had setup my 3D printer (have a prusai3 and a Solidoodle 4), it took no time, actually about an hour to get the first wheel printed.
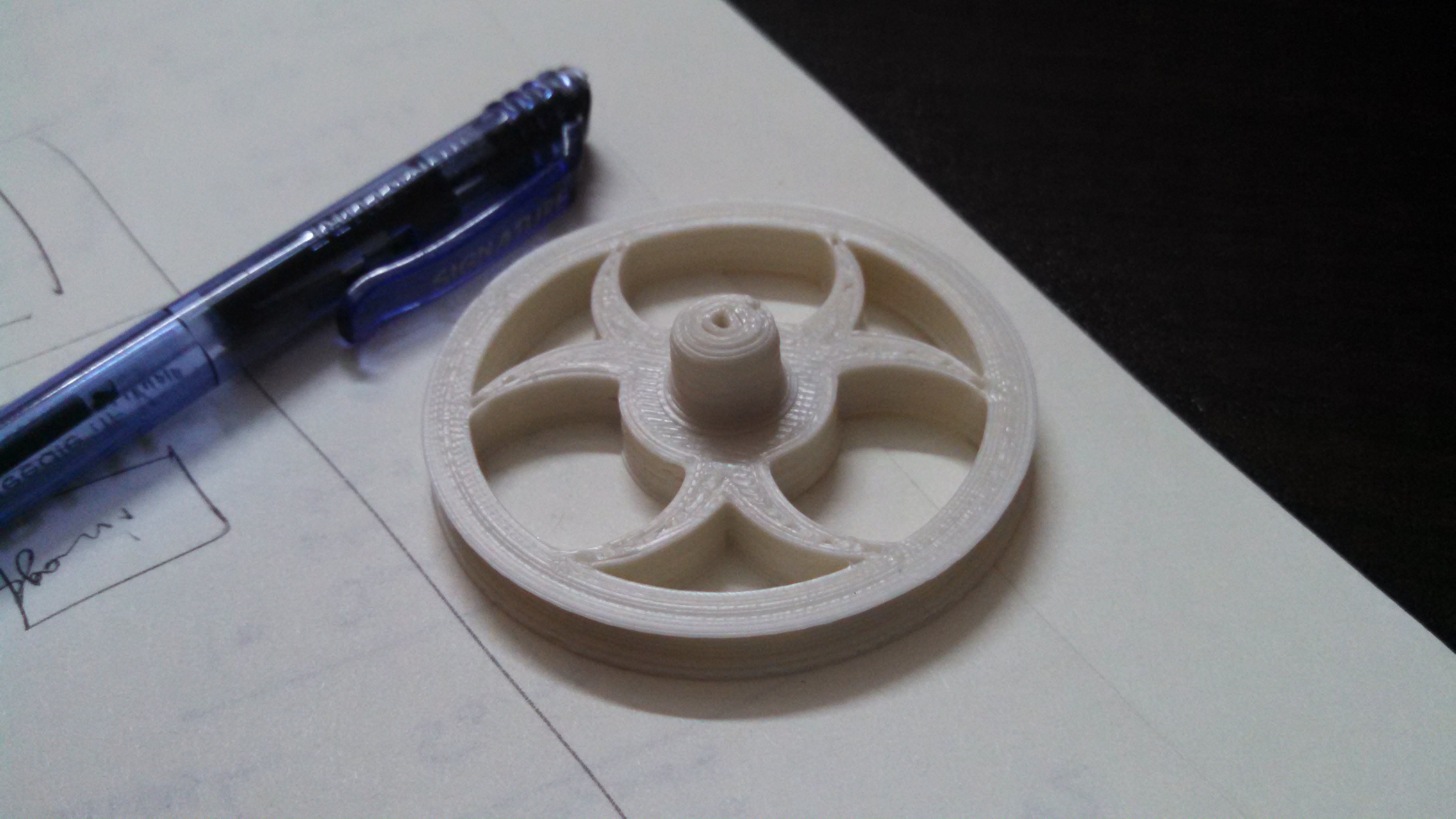
Bought o-rings from the local market and the wheels are ready - I also tried these wheels on a smaller LFR robot.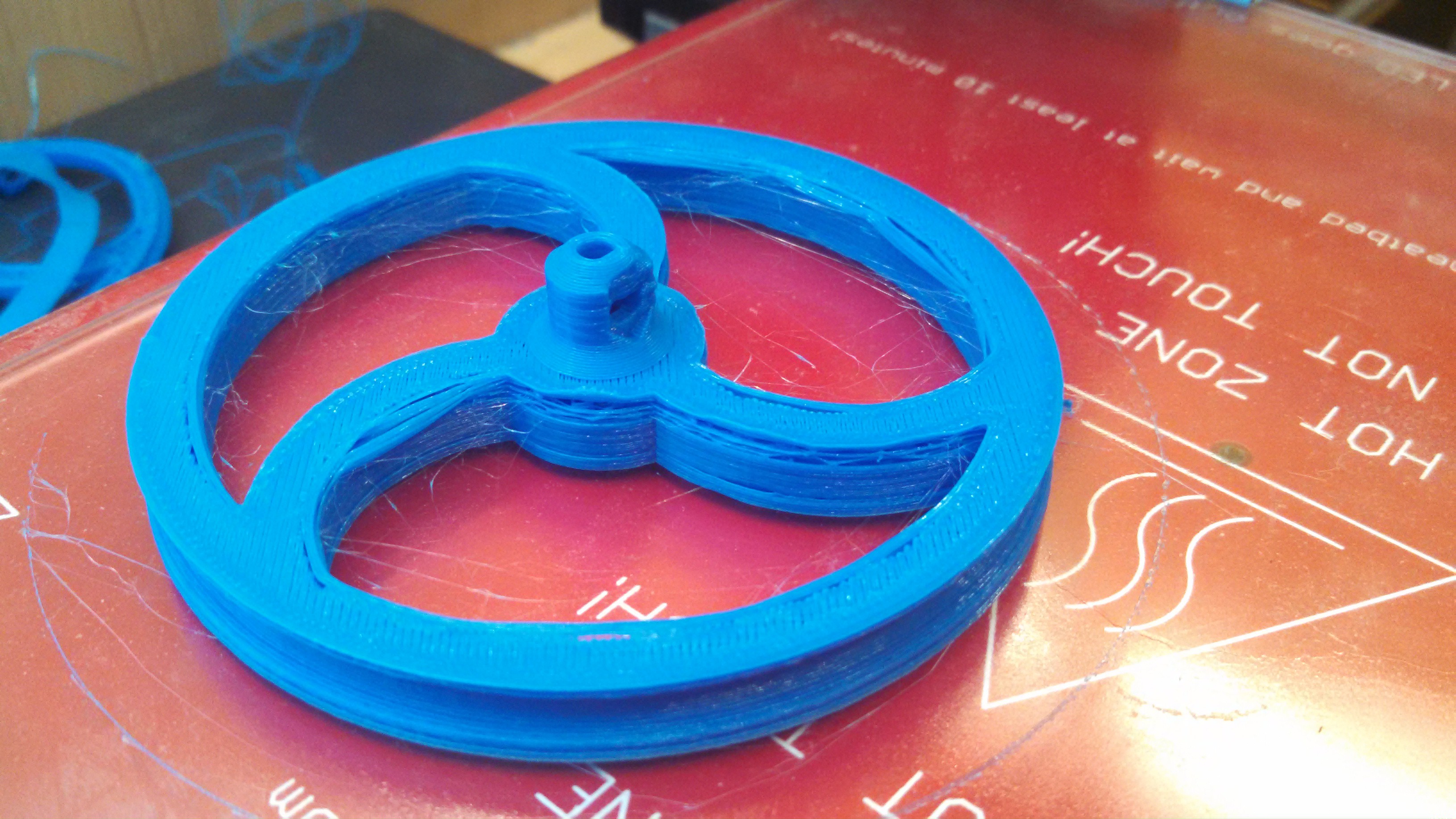
the small Line Follower Robot (without the sensors, but 3d printed wheels)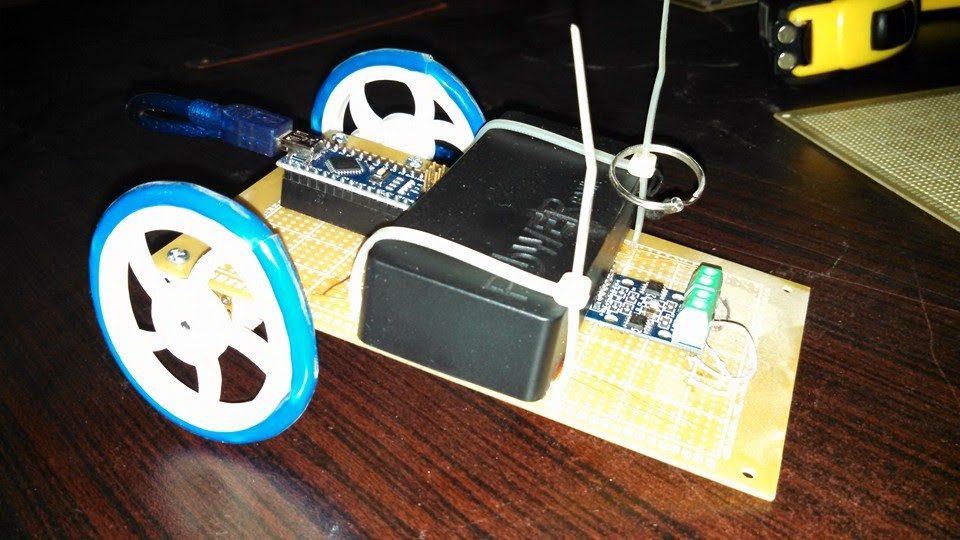
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.