 Hari Wiguna
Hari Wiguna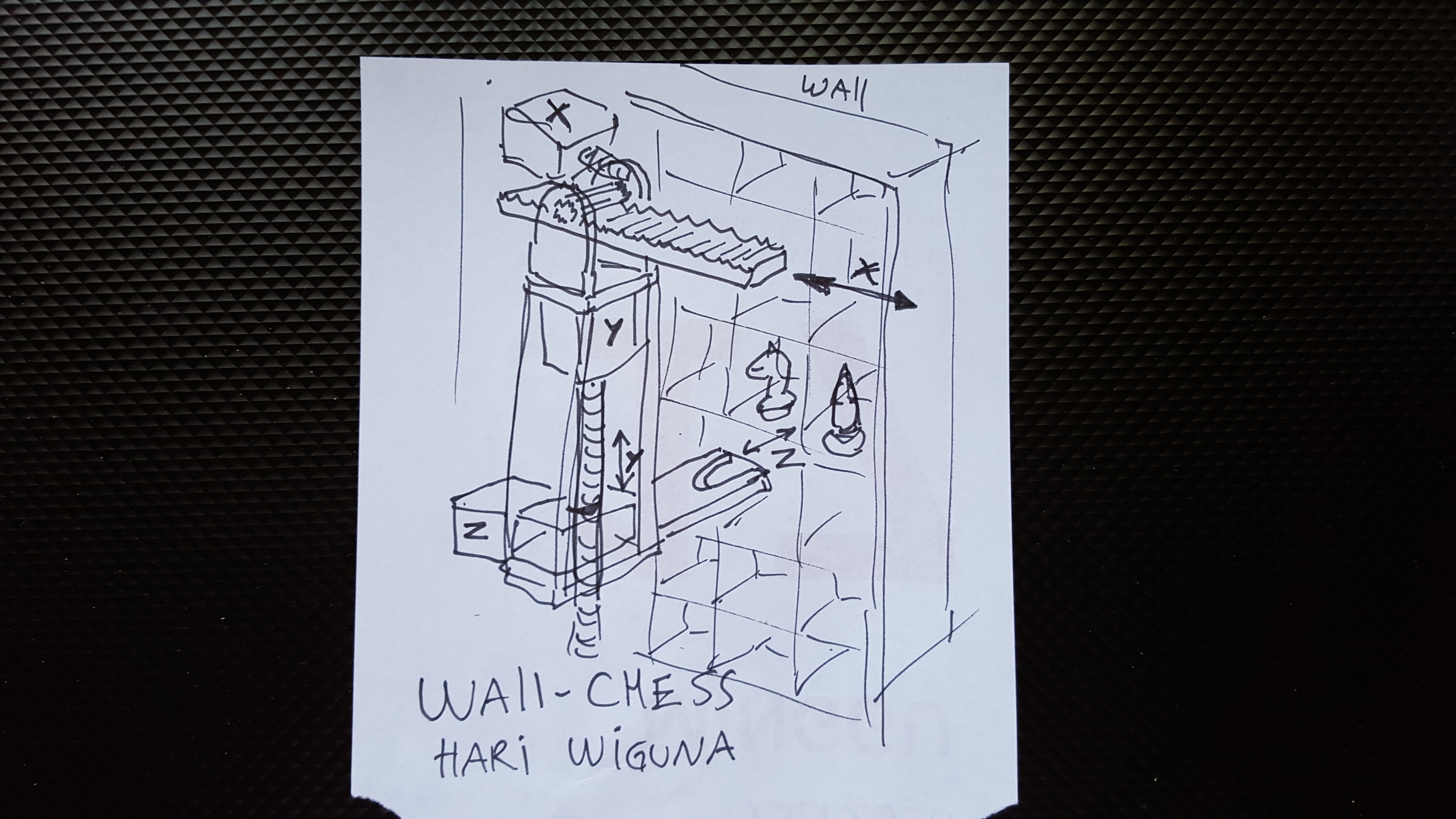
Originally, I thought it would be exactly like a 3D printer with a pincher instead of hot end, but since we won't need sub-milimeter accuracy, we should be able to simplify it.
Here's my first draft. Motors would be cheap $5 geared stepper motors from China. Driven via some h-bridge mosfet by an ESP8266.
X axis is a rack and pinion with static rack on the top of the shelf, Y is the usual threaded rod, and Z is another rack-pinion to "scoop up" the chess piece.
What do you think?
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.