 spacefelix
spacefelixWe now have a design concept and are now working on its refinement by developing a mechanical pressure layer that consists of an active pressure layer restrained by a passive pressure layer. This follows off the results of MIT's BioSuit development.
The active pressure layer will consist of fluid-inflated foam cells with pressures controlled individually or by the network of the cells' pressure sensors. The cells themselves will be arrayed in a pattern that follows the Lines Of Non-Extension (LONEs) to allow flexibility of movement. MIT's BioSuit had success with using open-cell foam-filled pressure cells, hence we are following their design.
The main concept of the system is the use of an intelligent network with a microcontroller to handle action / reaction as well as the use of MEMS micro valve arrays housed in the cloth for actuation of the cells using pneumatics. A video explains the valves.
The passive pressure layer will be composed layers of 2-way and 4-way stretch fabrics accordingly biased to the LONEs to allow for movement and rigidity as needed. Following off our current research into LONEs, we managed to start a map of LONEs on a subject's arm using a diagram of LONE's from a research paper.
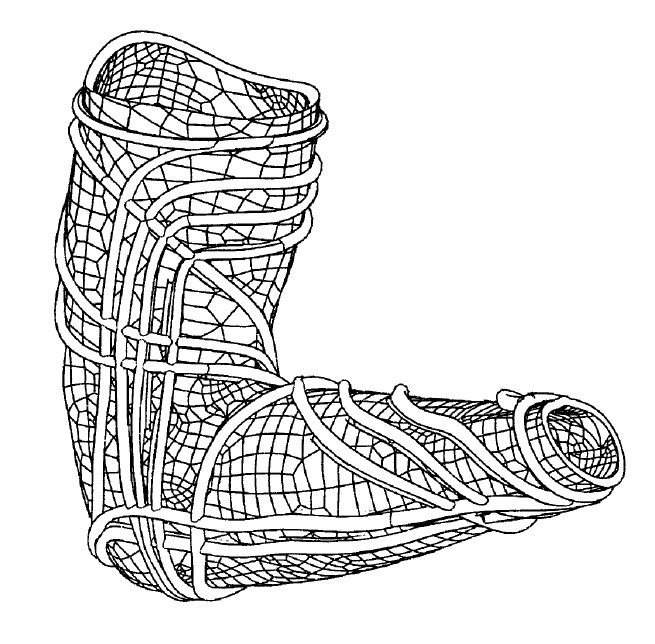
Diagram of Lines of Non-Extension (LONE) by Briner, 2011 for the development of an elastic-powered climbing exoskeleton.

Ethan Chew with the start of a Lines of Non-Extension (LONEs) map drawn on his arm.
From that map, we will have a guide to lay out, cut and stitch together fabric to make a quick test sleeve that can be worn on the subject to test basic mobility.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
Are you sure? yes | no