 Andrew Becker
Andrew BeckerSo here is the photo of the 3d printed parts I promised. Been messing around with different concepts and trying to make all of the parts fit on my printer. The batarang was just a test print, plus I wanted one.
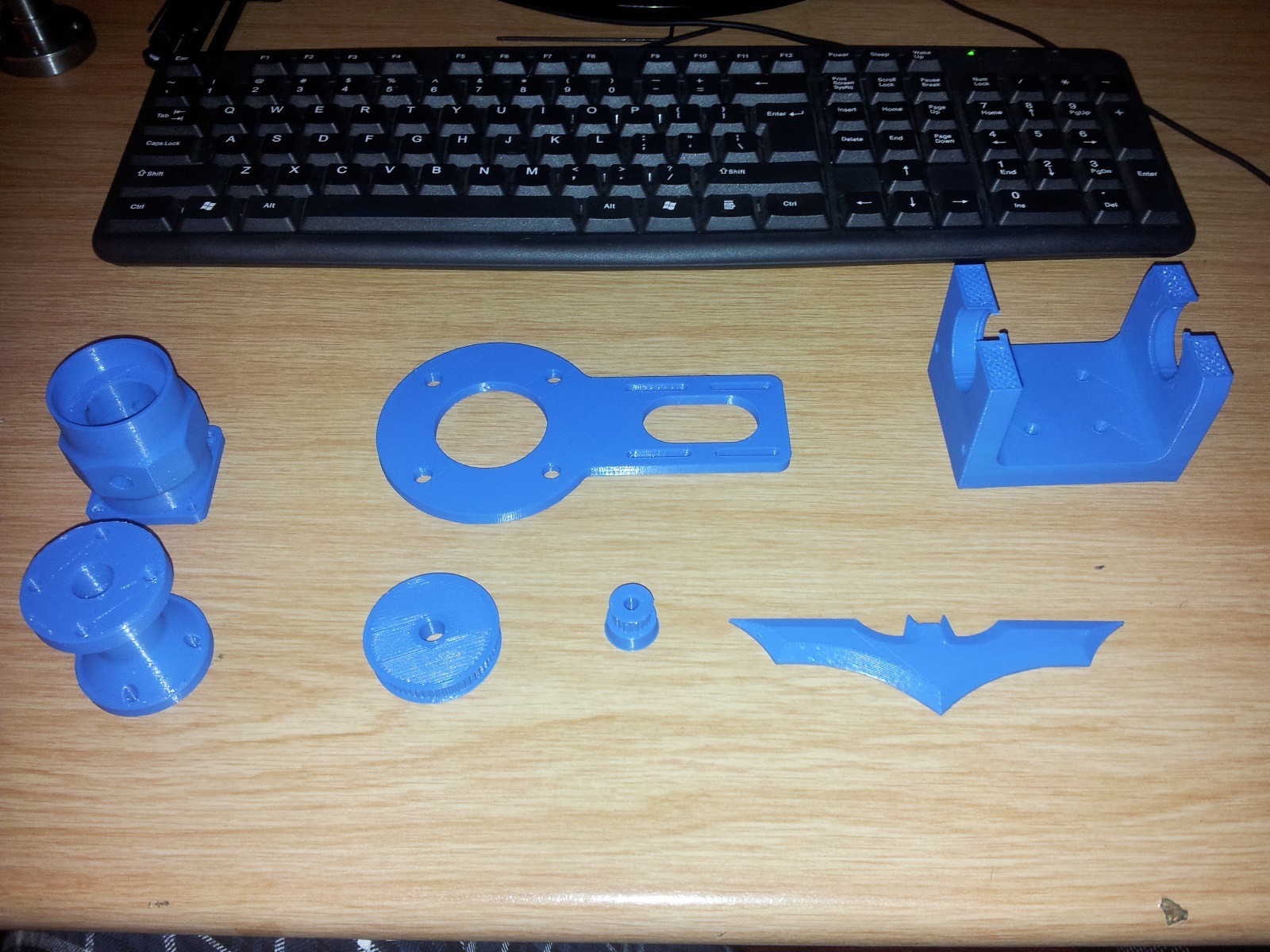
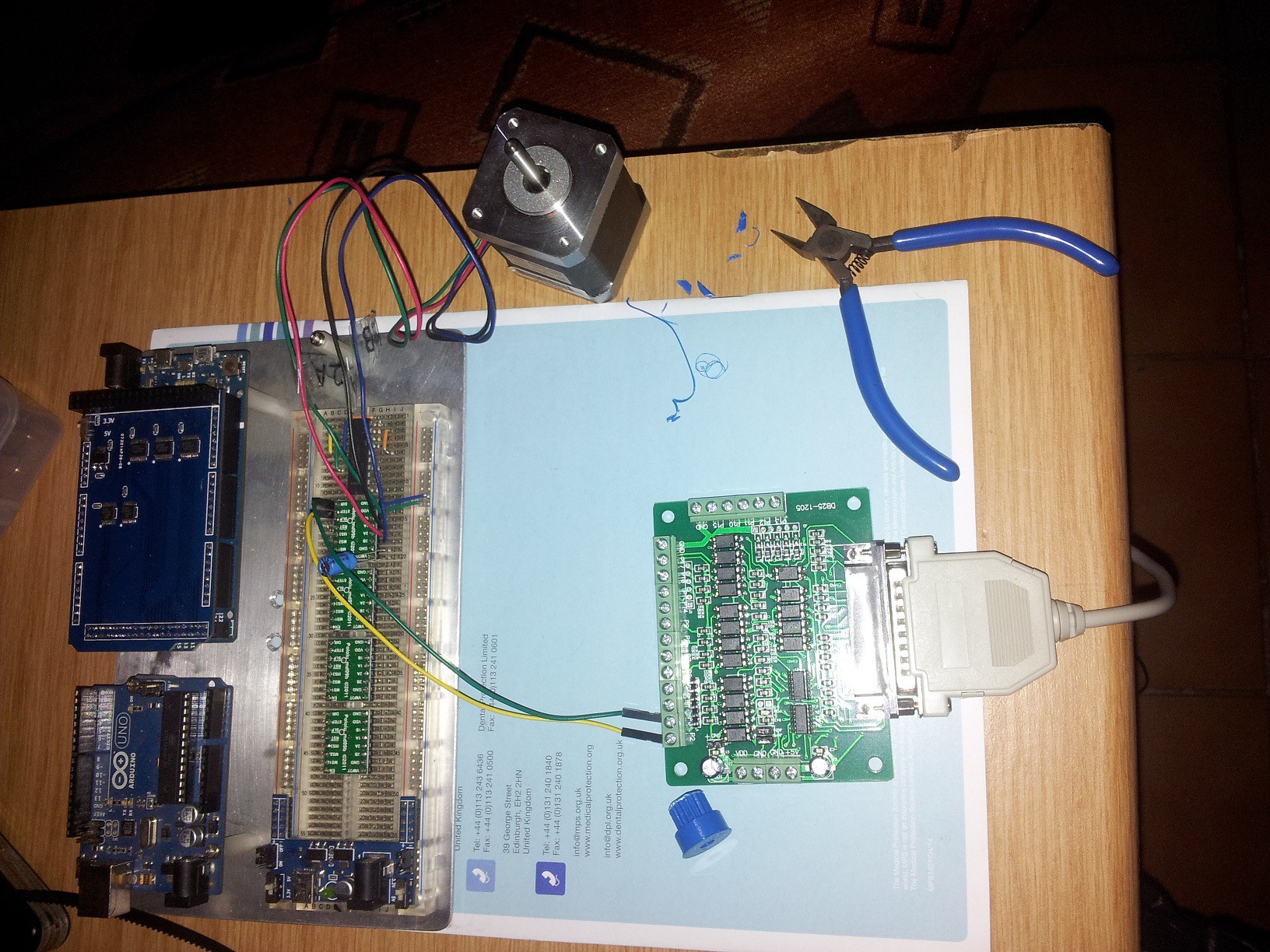
I've also been setting up to test the stepper motor drivers and controllers. In the photo is a simple paralell port breakout card with optocouplers and 4 of the Pololu 1.5A stepper drivers (along with an Arduino uno and a due I'm not using right now). I have about $600 worth of robot parts laying around and I'm getting anxious to turn it into something useful or at the very least entertaining.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.