 RobotDigg ME
RobotDigg MECongratulations from RobotDigg to Matteo 8th, August 2016, thanks for the builds and sharing. "The great news is a little more complicated, we're trying to find a way to release this project as 100% working by the end of the school year in a way that even if we stop developing it anybody else could continue our work (we were thinking about a virtualized pre-built web-service that can be installed by anybody) but we'll describe better everything as soon as we start thinking about the real software." Matteo says.
Update n°9, 2016-07-27 21:06:34
IT FLIES!!!
And it crashed...

The problema was the PI controller on the kk board and we almost manager
ti solve it, till... Well, it crashed... The problem isn't just the
crash itself, I'm perfectly able to repair everything (just the frame is
broken) but this small crash has revealed some weak point on the
structure that we must fix before continuing. We're probably going to
redesign the chassis, a new design is still under development. For now,
take a look at what the crash did!
Update n°7, 2016-07-23 20:27:26
First manual flight
As you can read from the title, we managed to get our first manual
flight, it was a complete disaster, the motors were spinning very
strangely, the power wasn't enough, and we have only two ideas to try:
First: the KK board we used in this test wasn't configured for this kind
of ESCs.
Second: the battery isn't powerful enough (that would be weird).
Let's dig into those options, shall we?
Why I suspect the problem could come from the KK board? Simply because
when I was testing the motors without the KK board (no stabilization,
just an Arduino with a simple Servo sketch) the motor were working just
fine, all at the same speed and without any fluctuation in speed. The
only variable here is the controller, so that could be the problem. The
solution should be reprogramming the KK board with those servos.
Second option, when I tested the motors with the Arduino, I wasn't using
any propellers, obviously the power needed to spin the motors without
the propellers is less than with them on, and maybe on the last test,
the battery wasn't able to deliver enough power (anyway this is very
unlikely).
We'll start optimizing the weight of this setup before proceeding to any
of the fixes, so we are sure that we won't change the displacement of
cables again.
Till then, bye!
Update n°6, 2016-07-12 22:58:23
It's alive!
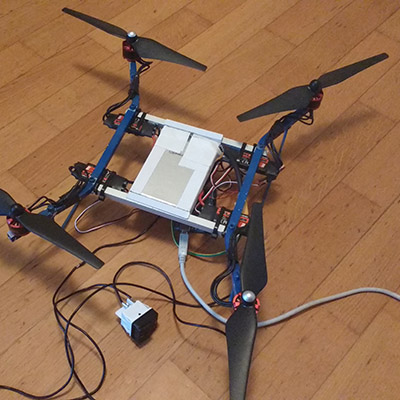
It's alive! It can fly!!! Today, after some mandatory cable management,
and after rebuilding a new battery pack, we tried to lift it up, guess
what? It flies!! Right now, it takeoff at about 50% throttle, the only
thing that we didn't count is the UDOO, that I guess is about 100grams,
but since we don't need a huge power for our demostrations, that's way
better than what I was expecting!
The battery is perfect, this one reallycame out perfectly: small, compact, solid, lightweight.
Next step: trying our setup with an Hobbyking KK board!
Update n°5, 2016-07-10 21:10:12
Problems again!
The UAV is almost done! (We just need the UDOO board and... well... many other fixes)
Today I tried to lift the UAV with the batteries and... it didn't go very well.
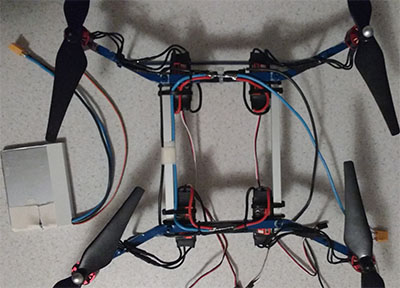
I incorporated a BMS into the batteries (as you can see in the last
update), my first idea was to have two separate outputs for the
batteries, one controlled by the BMS and another one directly connected
to the batteries, I found out today that the "charging pads" on the BMS
are meant not only for charging, but for discharging too! Awesome, we
have a protected output from the batteries! WRONG! This output is
limited to 10 Amps! Guess when we found that out! Right after the
battery was completely covered in hot glue (for insulation purposes)!
How I discovered that?
Well, after attaching everything on the chassis, I decided to do a quick
run just to see the UAV floating a tiny bit over the floor, so I
attached an Arduino on the ESCs, I connected a small switch (to be able
to turn everything...
Read more »