 VPugliese323
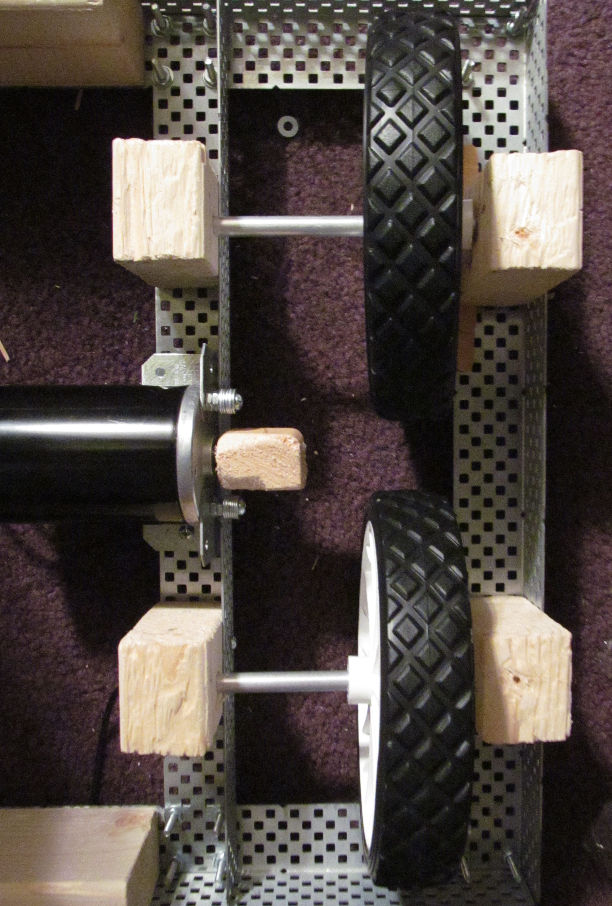
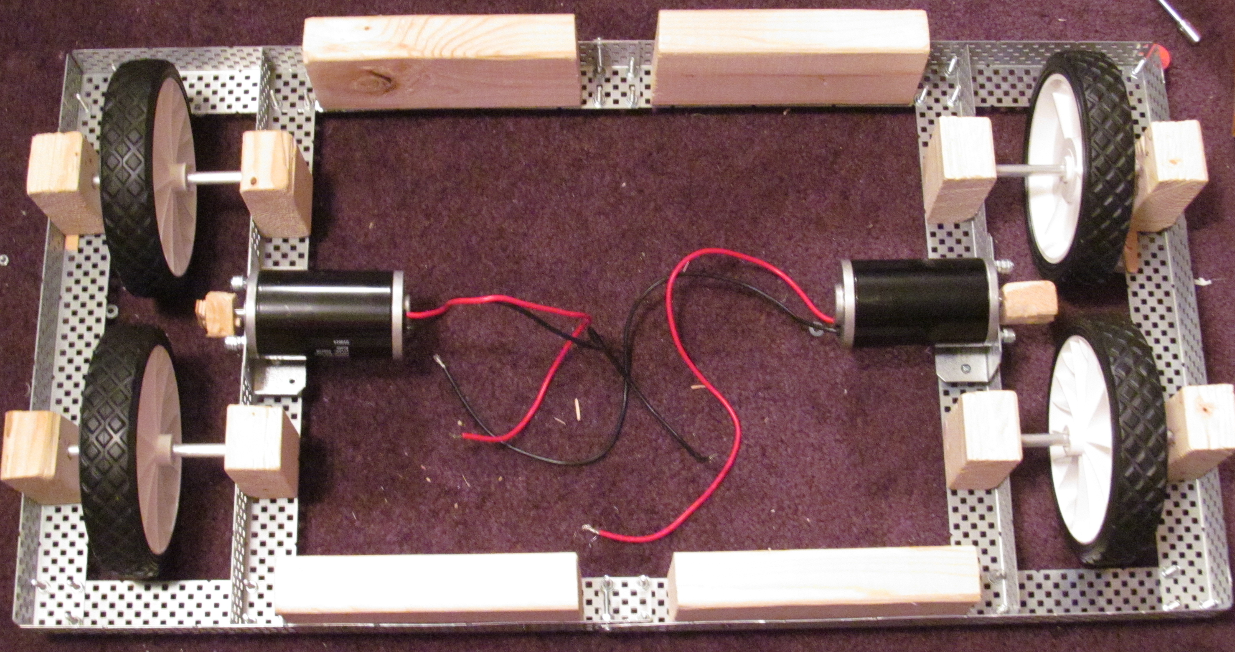
VPugliese323Today the shift register needed for the control system has been shipped and received. In addition, work on the drivetrain has progressed significantly. The current focus is in strengthening it to hold the weight of the rest of the robot. The current drivetrain (without gears) is pictured below:

Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.