 Chad Paik
Chad Paik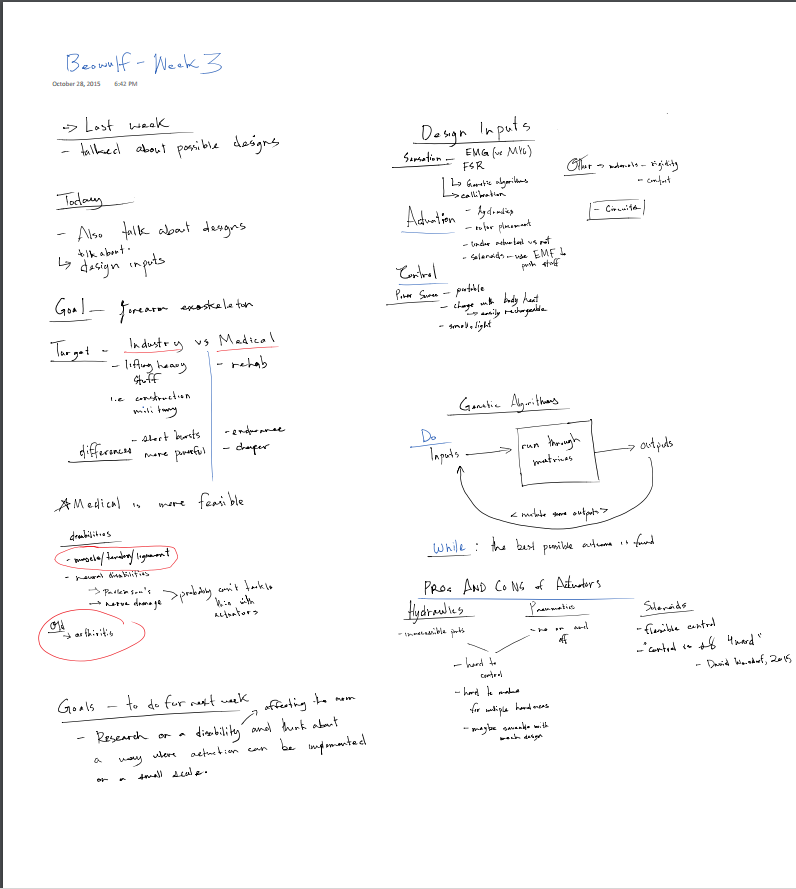 Above is a run-down of our early ideation process that covers aspects of the project such as goals, feasibility, target audience, design inputs (sensory inputs, actuation, control, safety), genetic algorithms, and pros/cons of actuators.
Above is a run-down of our early ideation process that covers aspects of the project such as goals, feasibility, target audience, design inputs (sensory inputs, actuation, control, safety), genetic algorithms, and pros/cons of actuators.
Project Inception
A project log for BEOWULF
Robotic Exoskeleton for Grip Enhancement and Stroke Rehabilitation
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.