 Chad Paik
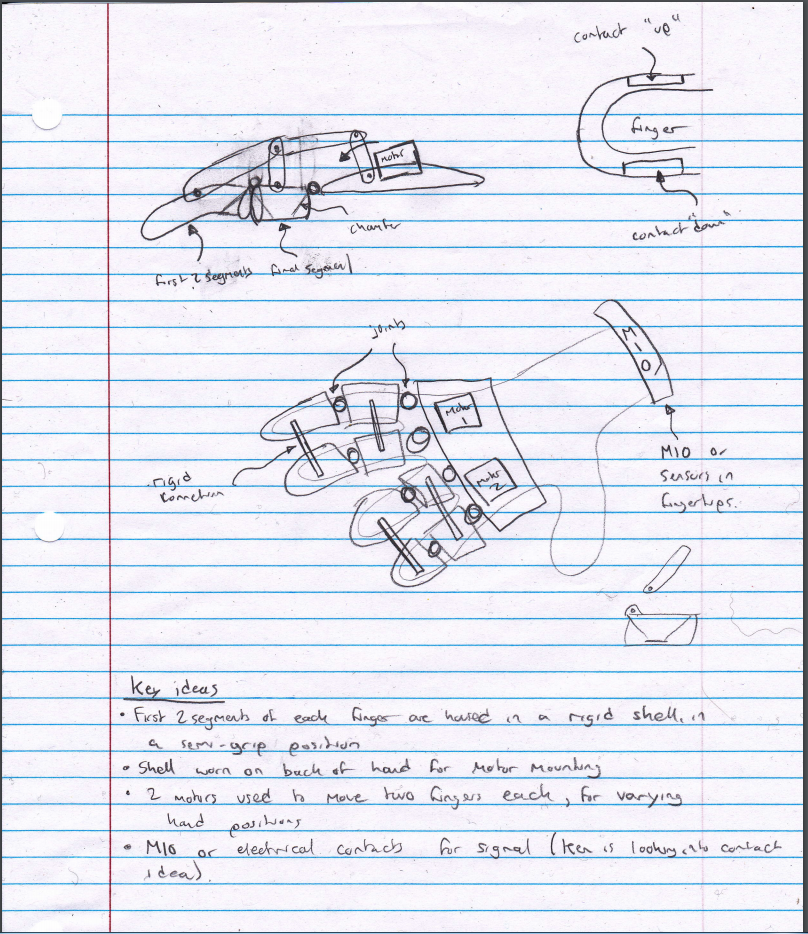
Chad PaikWe were initially attempting to control 2 fingers at a time with one actuator alongside a 4-bar linkage actuation design. We also brainstormed a good joint design that's ergonomic for the user to move their finger in (we later realize that we failed at this intention). We ended up deciding that we were going to use the Myo (not MIO) armband for the EMG signal processing for ease of use and then later on adapt electrodes for signal processing.
Below demonstrates an example of the engineering sketch that we chose as our final actuation path we chose to take.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.