 Chad Paik
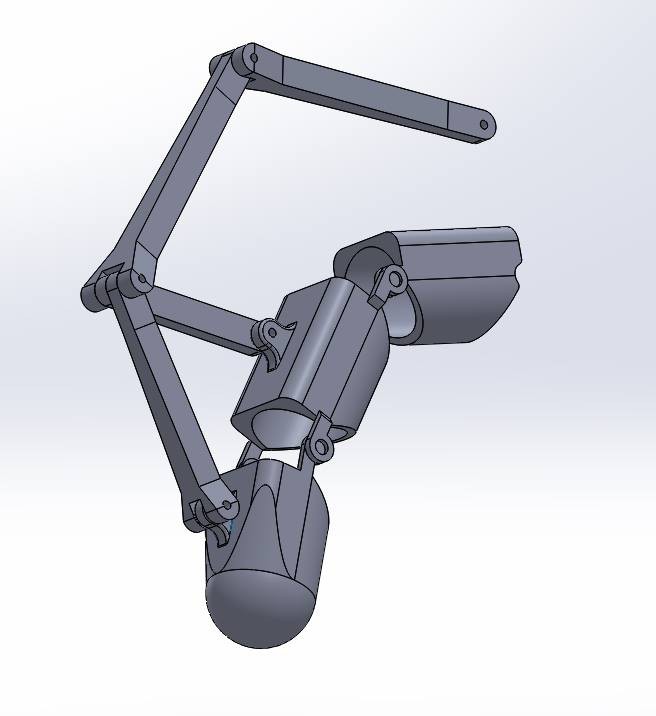
Chad PaikAfter doing some rough calculations for 4-Bar linkages, it was implemented in the SolidWorks design below.
A project log for BEOWULF
Robotic Exoskeleton for Grip Enhancement and Stroke Rehabilitation
After doing some rough calculations for 4-Bar linkages, it was implemented in the SolidWorks design below.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.