 Morning.Star
Morning.Star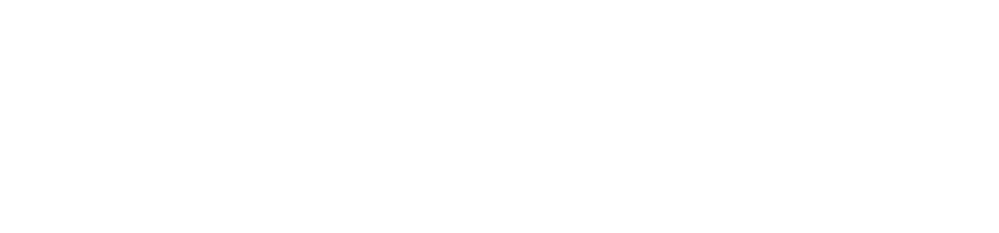
The prototype will be based on current Drone technology to make it simple to build. There are some standards appearing in the hardware, after discussion with @ken.do I've decided to opt for standard, as kits of parts based on them are available.
Naze-32 6DOF Flight Controller
These things are everywhere, obviously I'm buying in the UK so good old eBay to the rescue. This will form the autonomous part of Pandelphi's nervous system, when all hooked up and powered this bit instructs the motors to hold position all on its own.
It has built-in gyro sensors (MPU6500) and battery monitoring and its own STM32 F103 processor with a dedicated control port.
Obviously I wont be needing a receiver board or any of the FPV kit.
BLHeli 12A Electronic Speed Controller

Also seem to be pretty much the one for the job. These take instructions from the Naze and power from the batteries and feed it to the motors, these things are also everywhere.
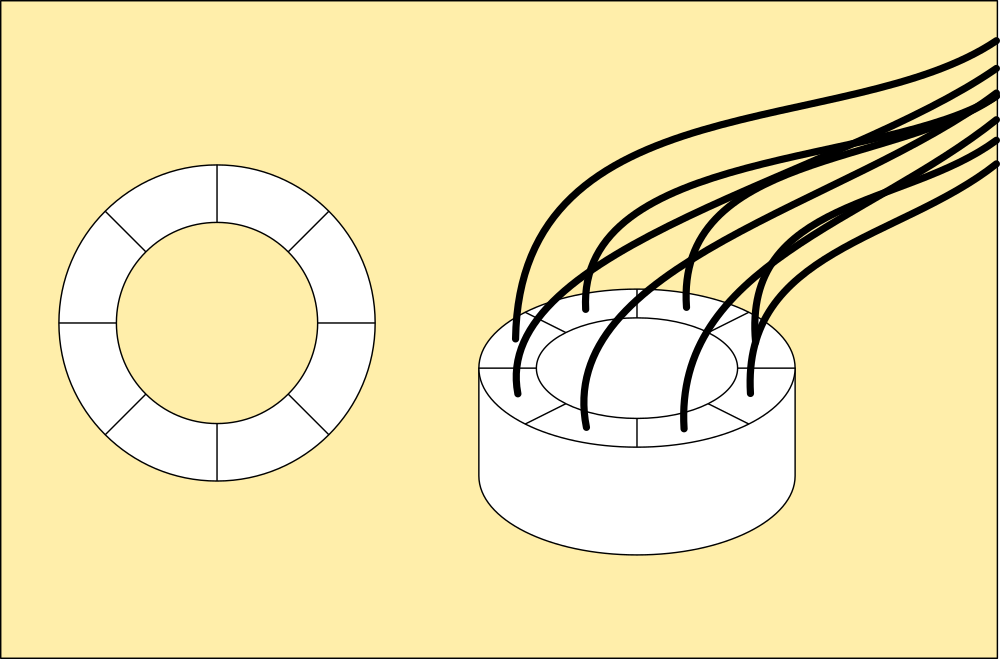
Motors

DC Brushless motor
These are the hard part, obviously what I'm trying to do isnt standard drone technology and I'm trying to consider efficiency in an arena that likes to go far and fast.
Intelligent Control Systems
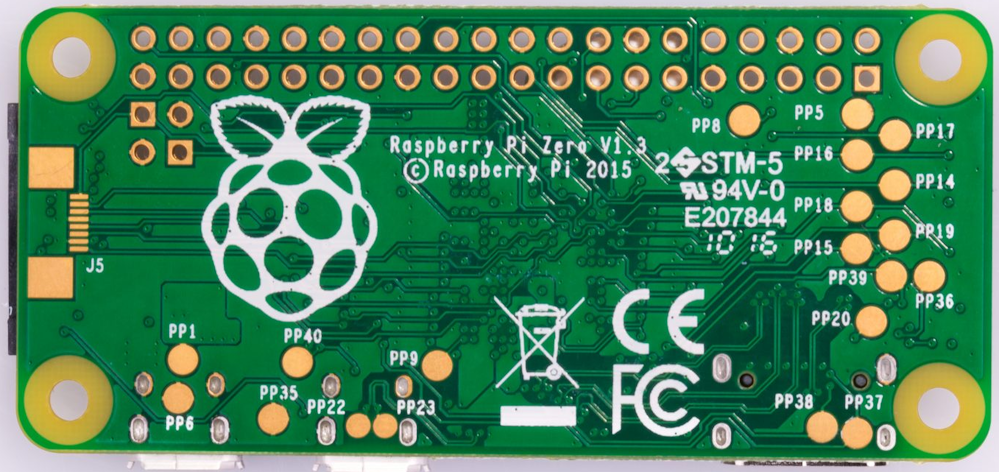
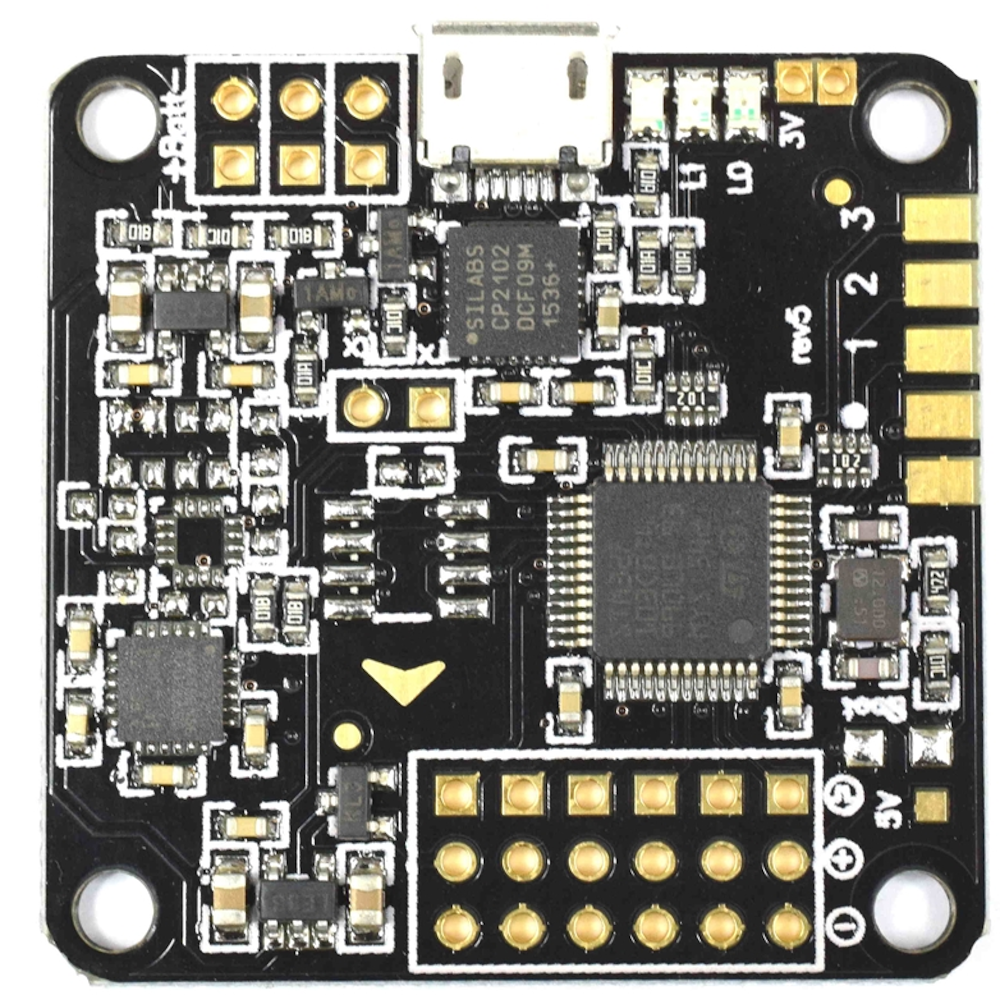
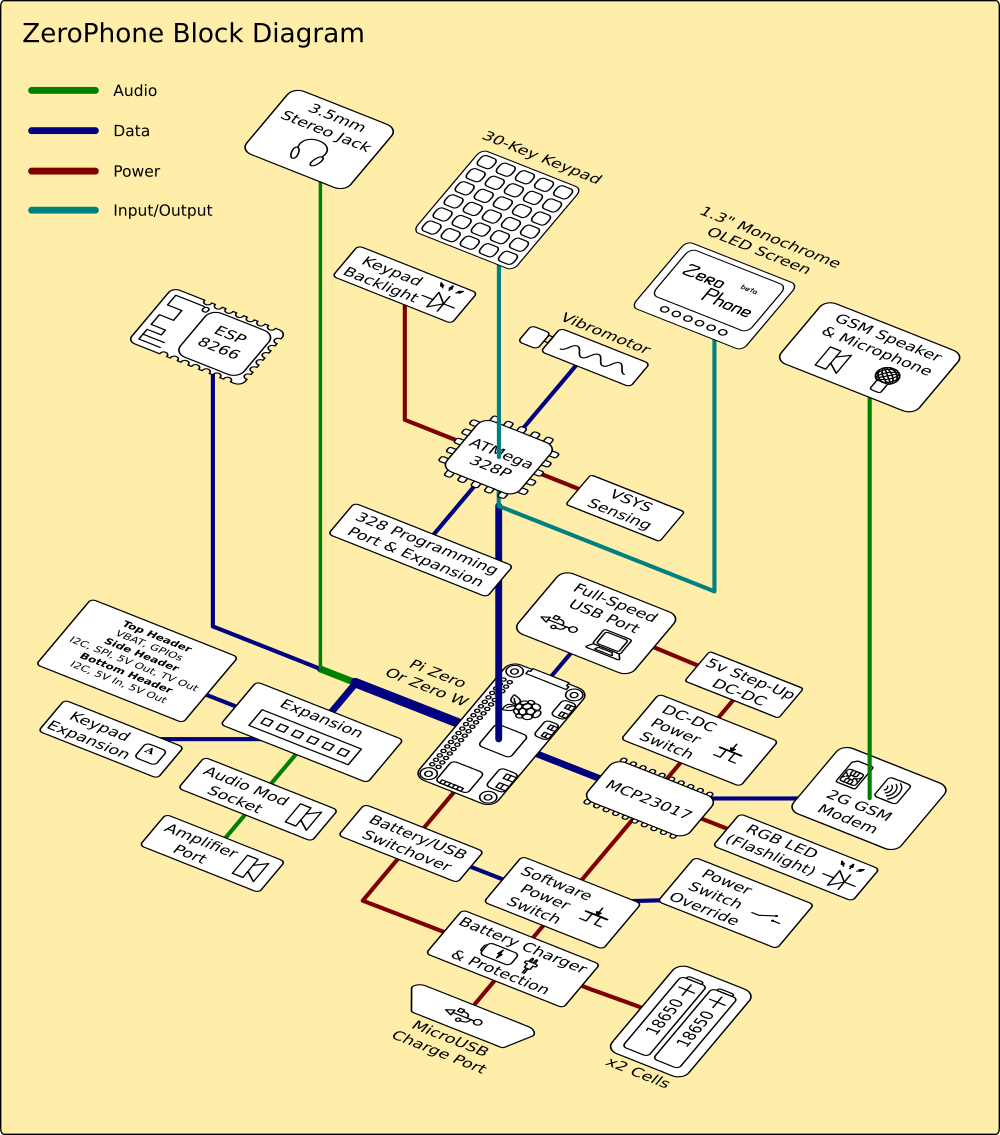
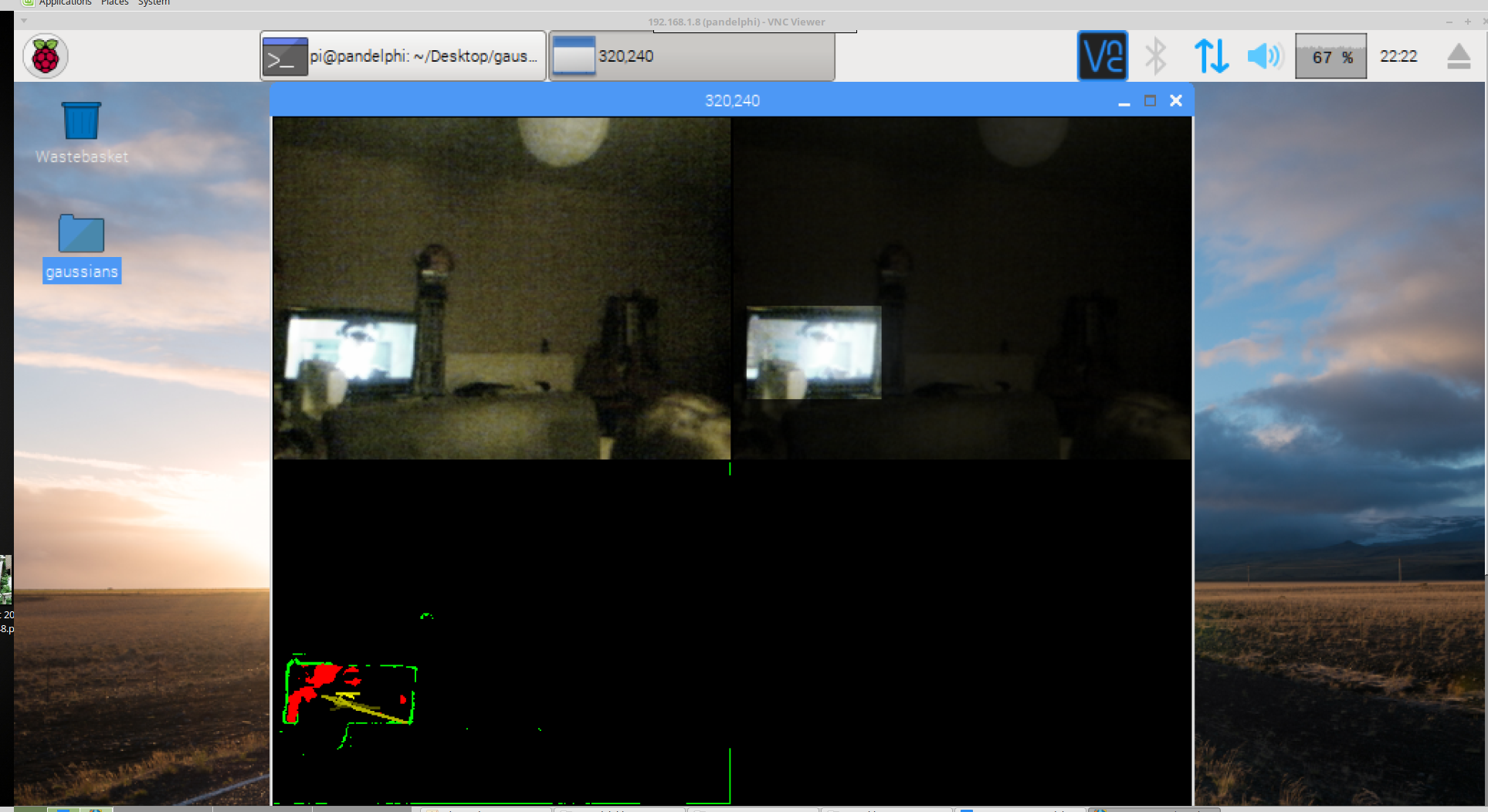
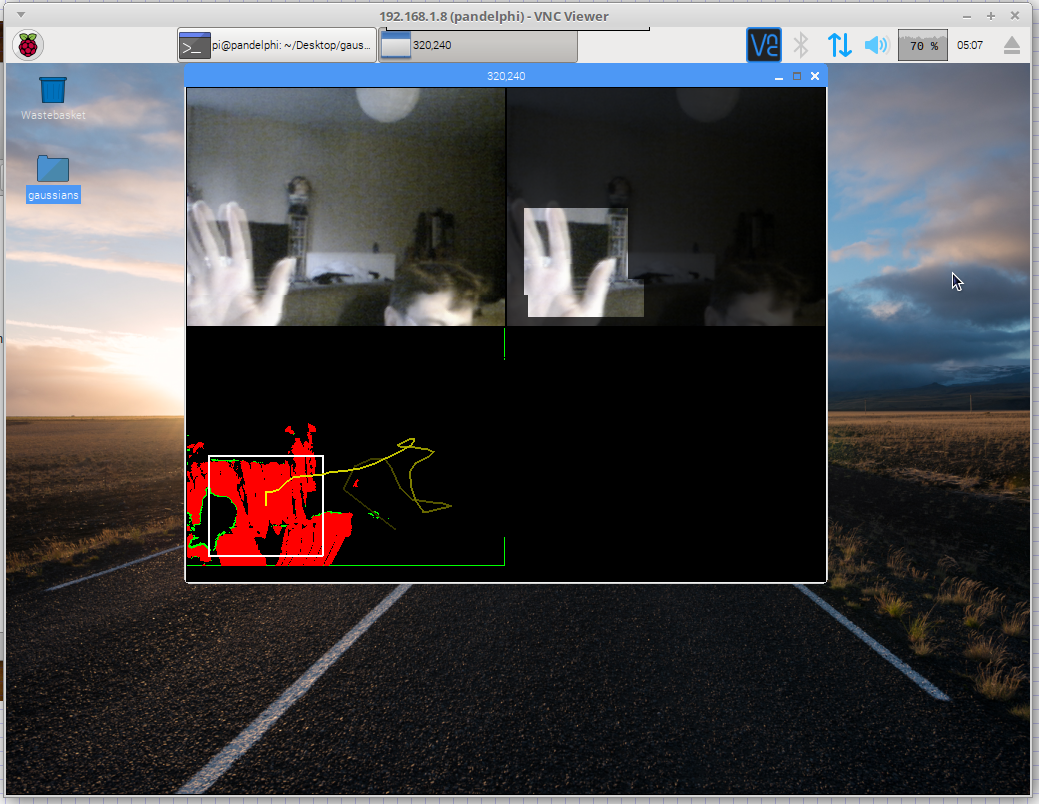
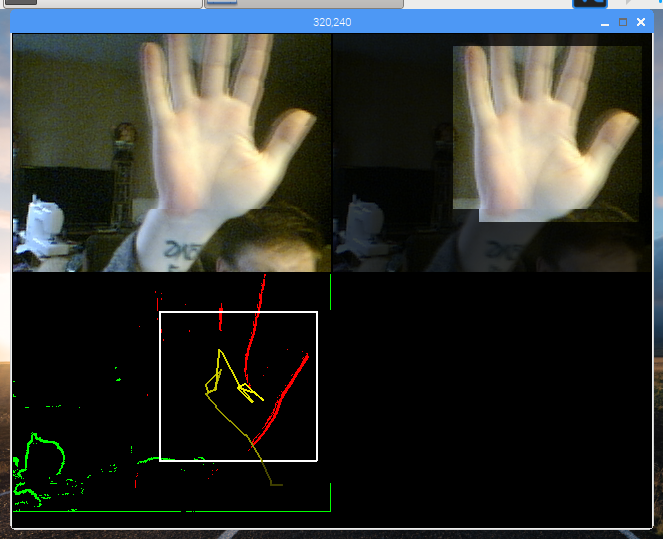
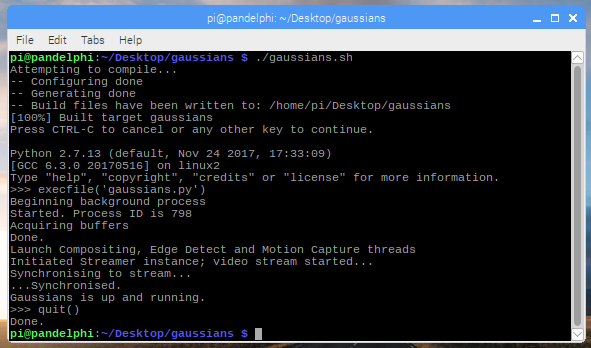
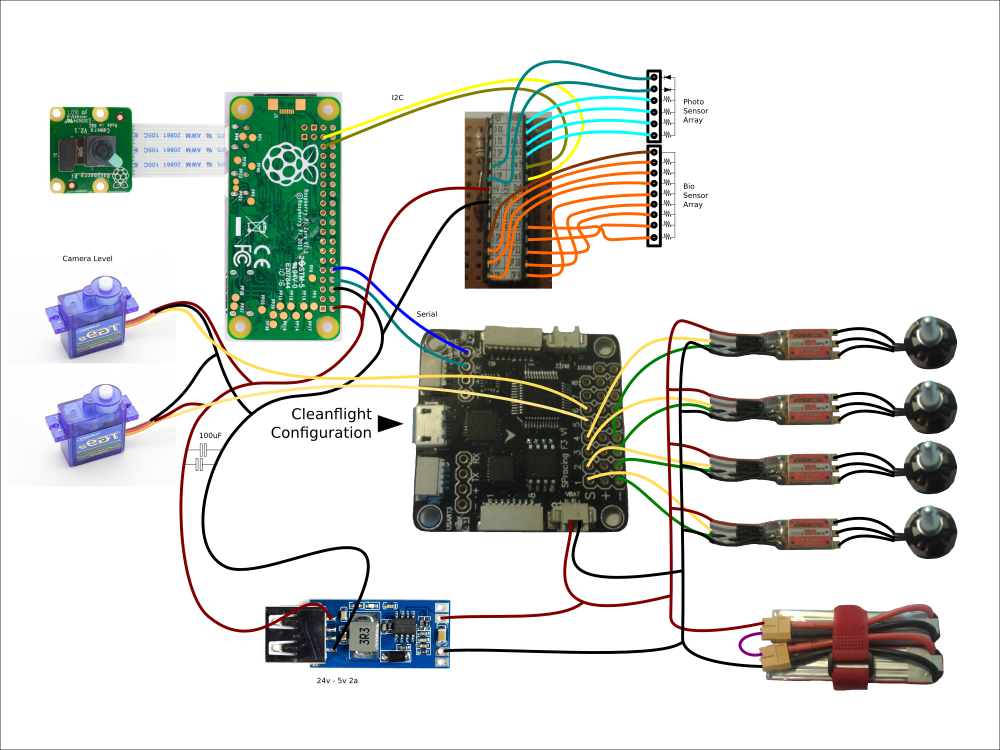
Raspberry Pi Zero, of course, paired with a Pi HD Cam and running AIMos. Serial link to an Atmel chip which handles the CapSense Antenna Array wired into the shell. Also appears as a Smart Home Device so the Home UX can control it.
Shells
Depron Prototype, as it is easily replaceable and weighs almost nothing. It's already white too and requires very little work.
Pandelphi Cub will use current textiles and materials from the soft toy industry and poly-carbonate frame.
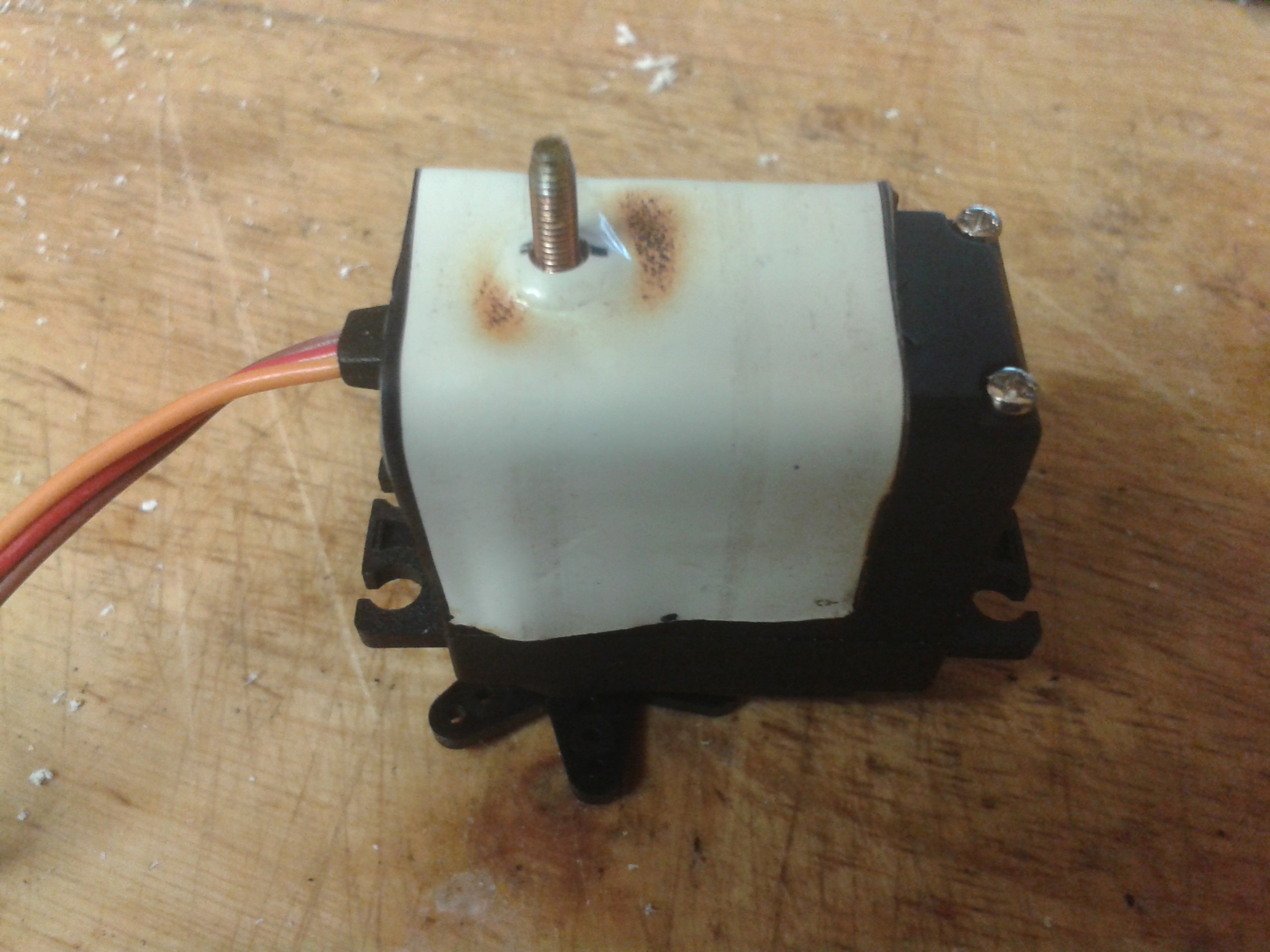
Servos
Pandelphi Cub uses the same interfaces except for the mechanism, which is servo driven. Cardware was based on hobby servos due to funding issues, I have chosen the new MGS996 for this project.
Home UX :

The prototype will carry an Echo Dot, but other devices and platforms are available.
From Amazon.com:
- Amazon Echo Dot is a hands-free, voice-controlled device that uses Alexa to play music, control smart home devices, provide information, read the news, set alarms and more
- Connects to speakers or headphones through Bluetooth or 3.5 mm stereo cable to play music from Amazon Music, Spotify and TuneIn. Play music simultaneously across multiple Echo devices and speakers connected via cable with multi-room music (Available for Amazon Music and TuneIn. Bluetooth not supported)
- Call or message anyone hands-free who also has an Echo device or the Alexa App. Also, quickly connect to other Echo devices in your home using just your voice
- Controls lights, switches, TVs, thermostats and more with compatible connected devices from WeMo, Philips Hue, Sony, Hive, Netatmo, Nest, tado° and others
- Hears you from across the room with 7 microphones for far-field hands-free voice control, even in noisy environments or while playing music
- Includes a built-in speaker so it can work on its own as a smart alarm clock in the bedroom, an assistant in the kitchen, or anywhere you might want a voice-controlled device
- Always getting smarter - Alexa updates through the cloud automatically and is continually learning, adding new features and skill
Pandelphi has a pouch dedicated to carrying one of these devices, supplies power to it and interfaces to it via IOT, so does not require complicated adapters or solutions as the UX field expands.










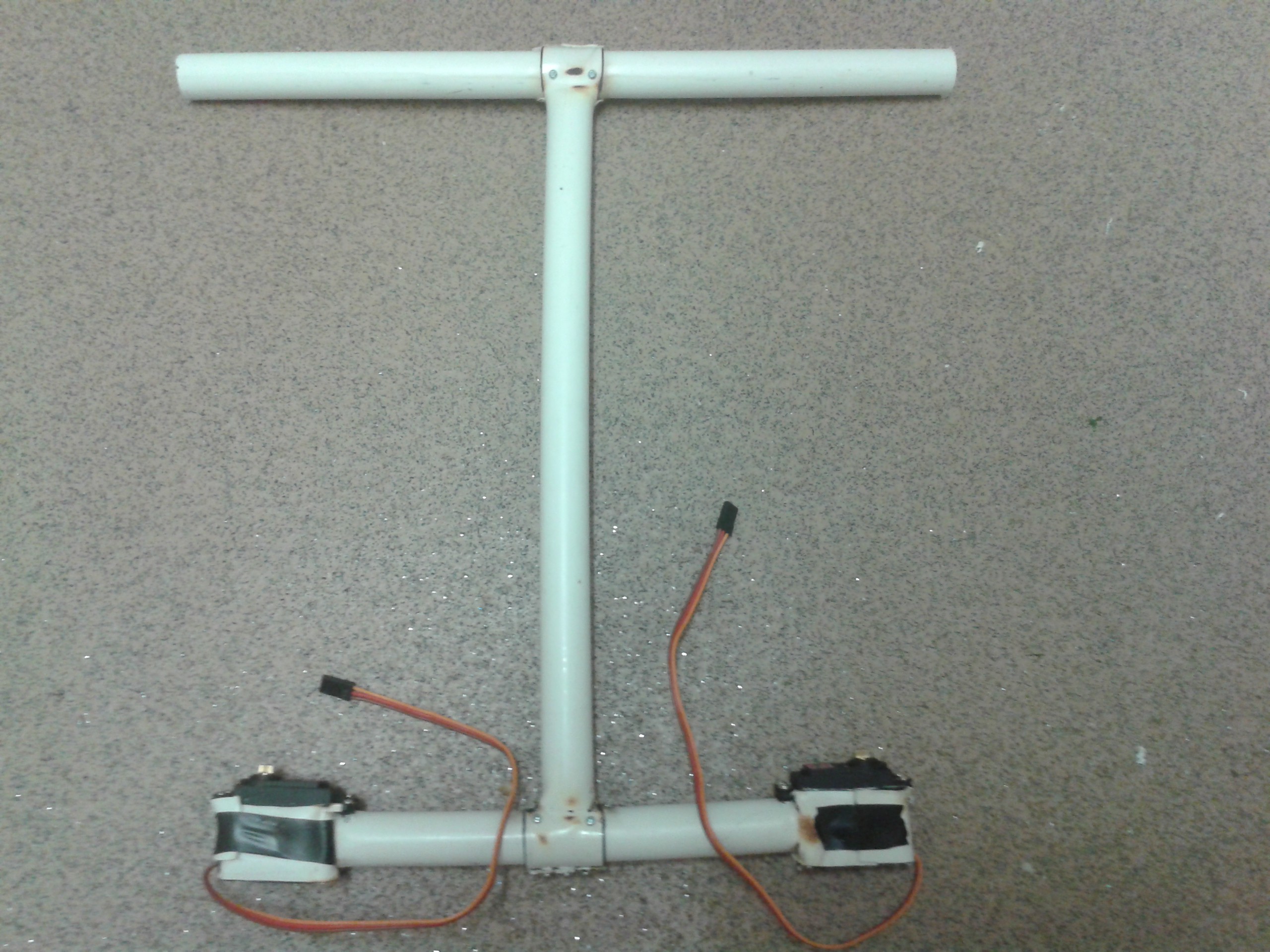
 Here's an irony.
Here's an irony.












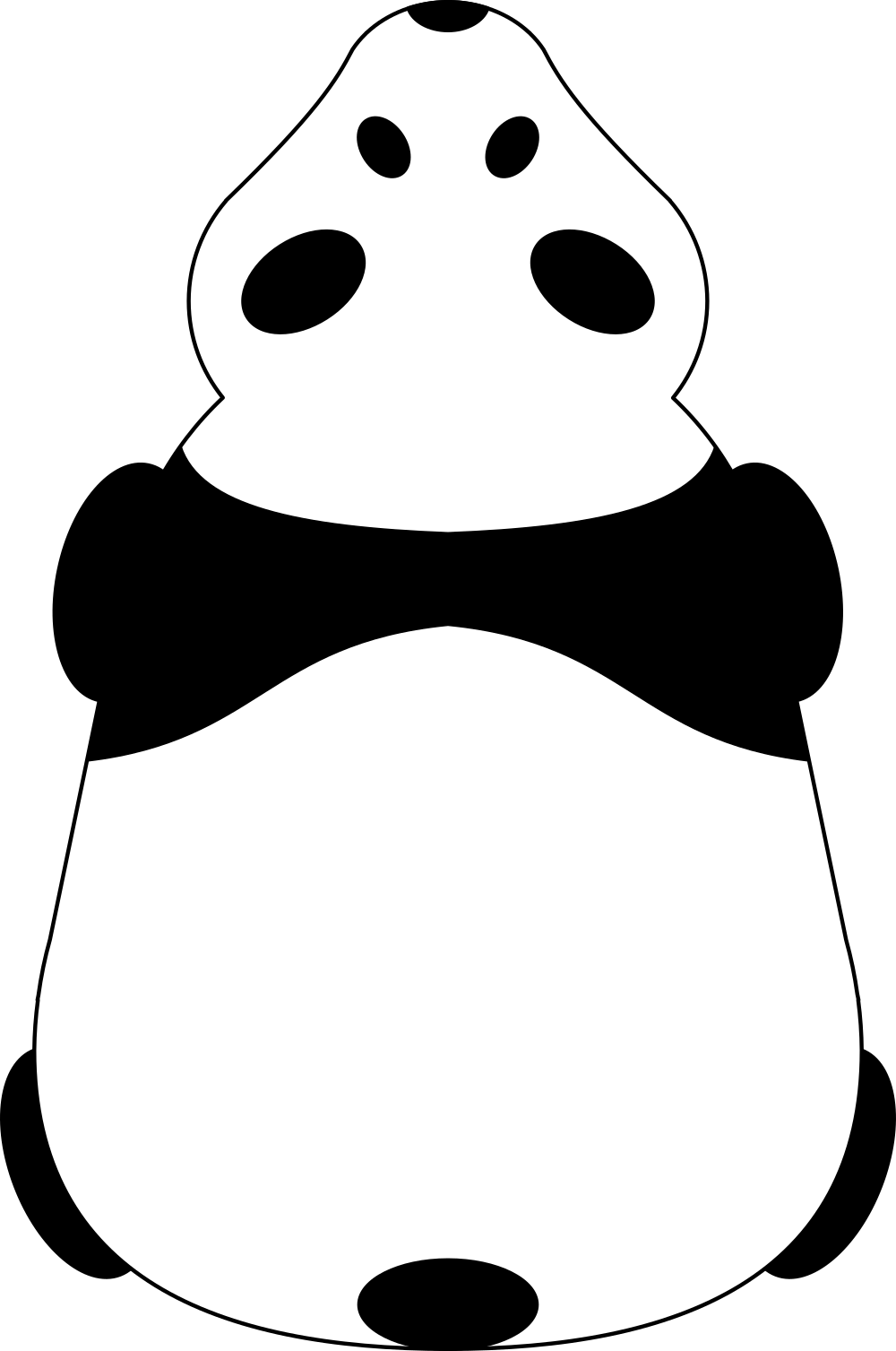


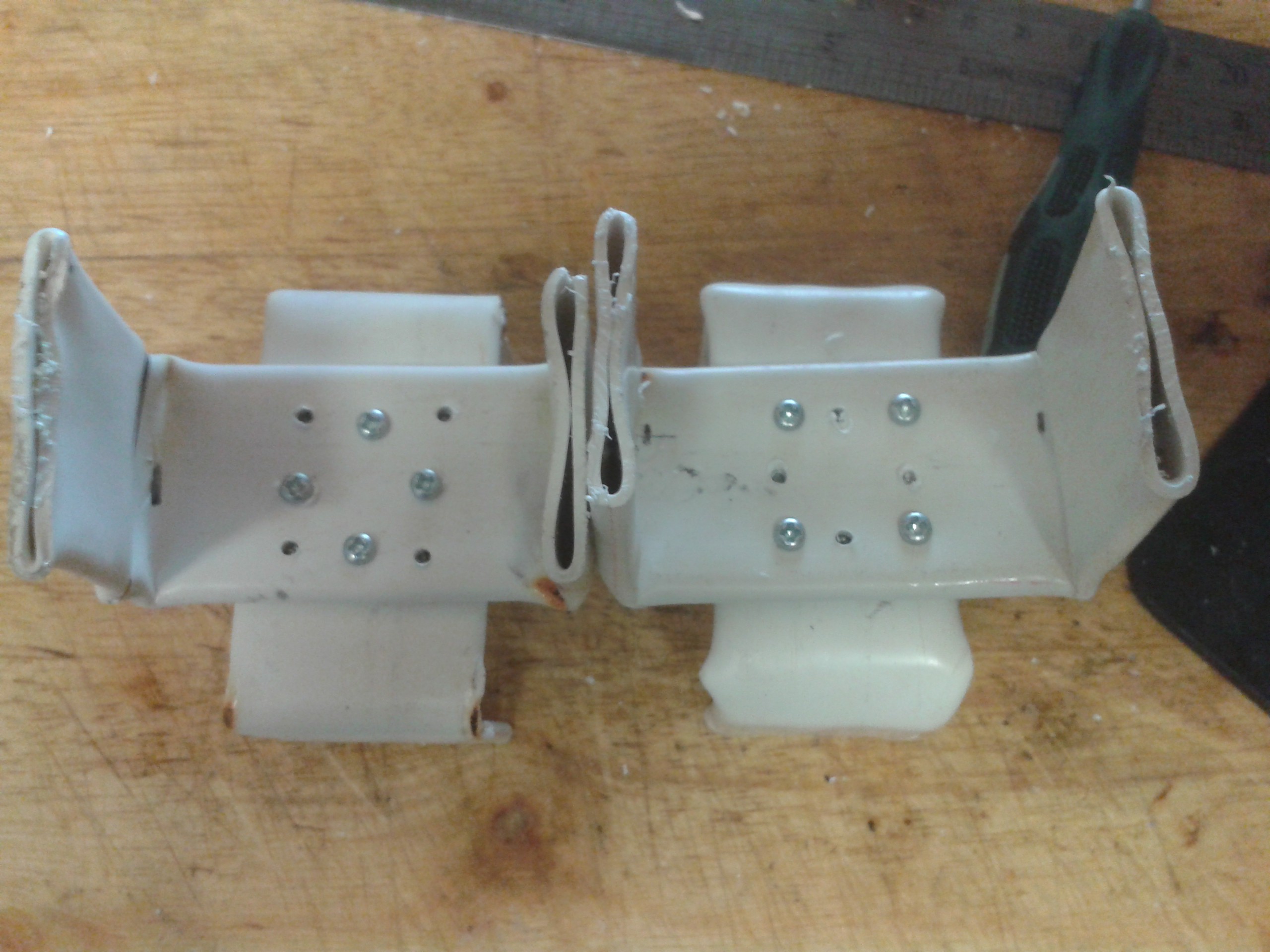
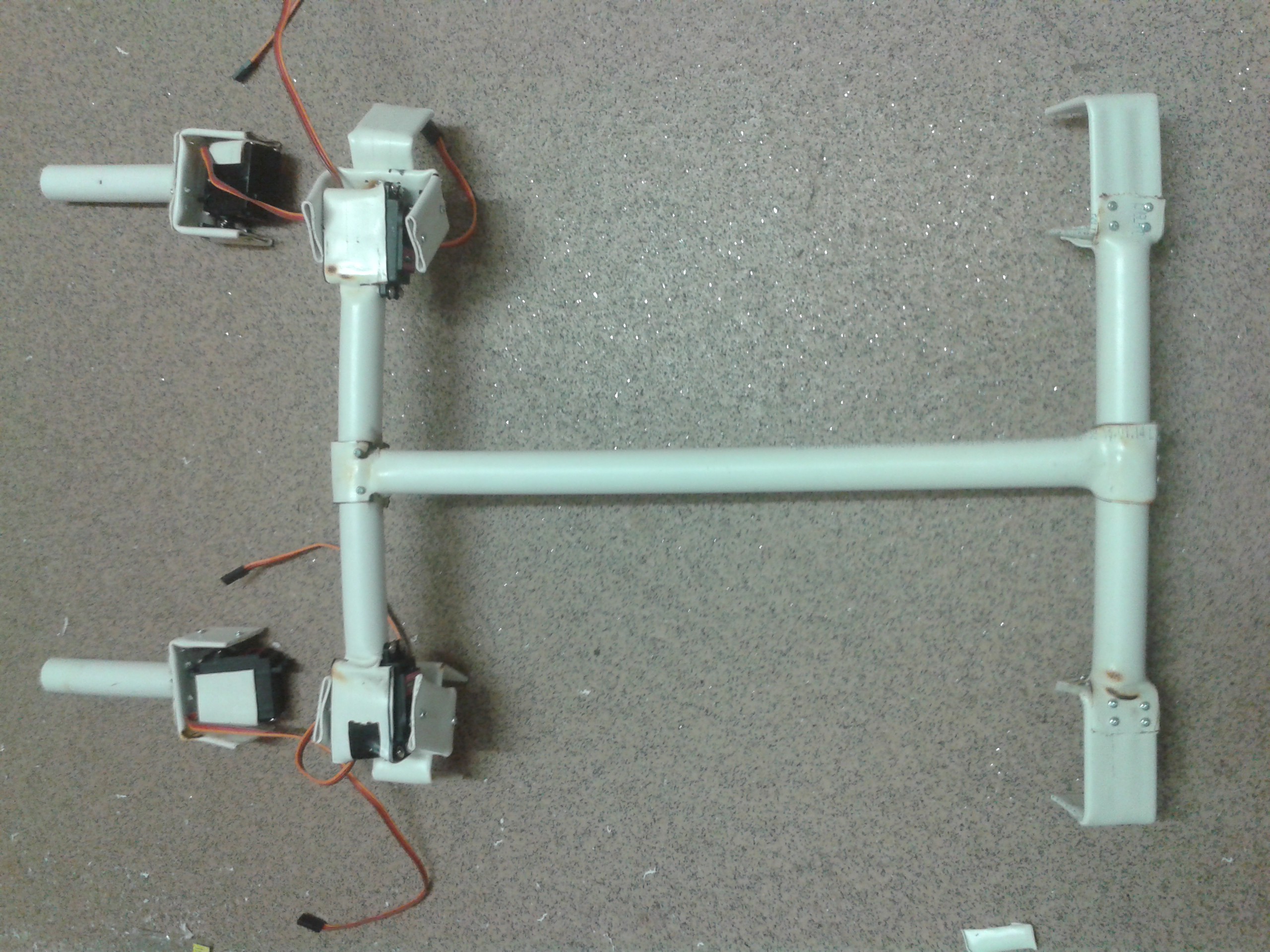
 Thats all the body servos in place, just needs some adjustments...
Thats all the body servos in place, just needs some adjustments...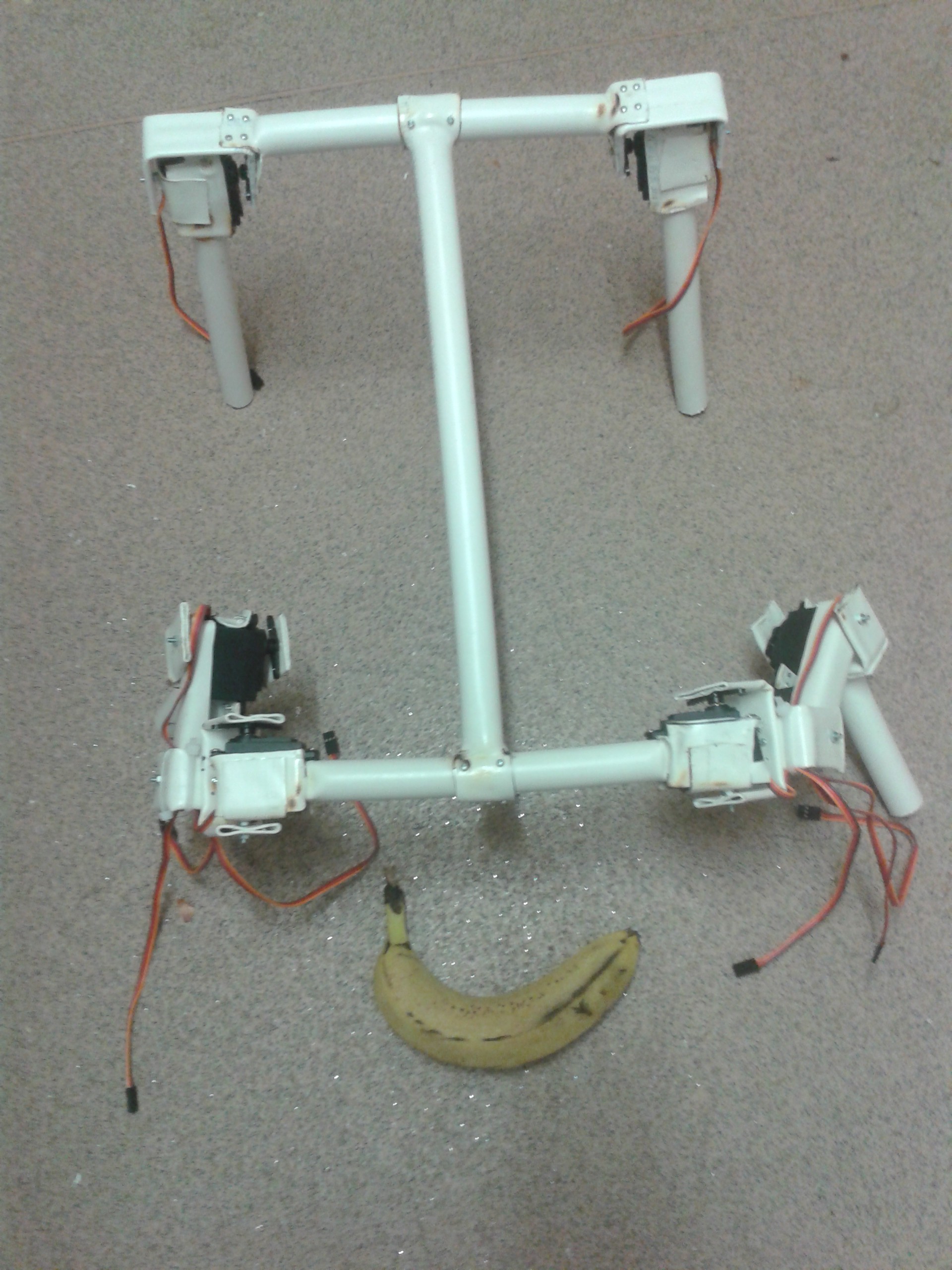 And banana sensing equipment...
And banana sensing equipment...


 After a bit of head-scratching I decided simple was best, and rather than cut and fold these with a single layer I just joined two of them back-to-back. I accidentally dropped the first one on the kitchen floor while I was making them, and it bounced, so I stomped it and kicked it around some with my boots on. No visible difference in appearance even, that will do nicely.
After a bit of head-scratching I decided simple was best, and rather than cut and fold these with a single layer I just joined two of them back-to-back. I accidentally dropped the first one on the kitchen floor while I was making them, and it bounced, so I stomped it and kicked it around some with my boots on. No visible difference in appearance even, that will do nicely.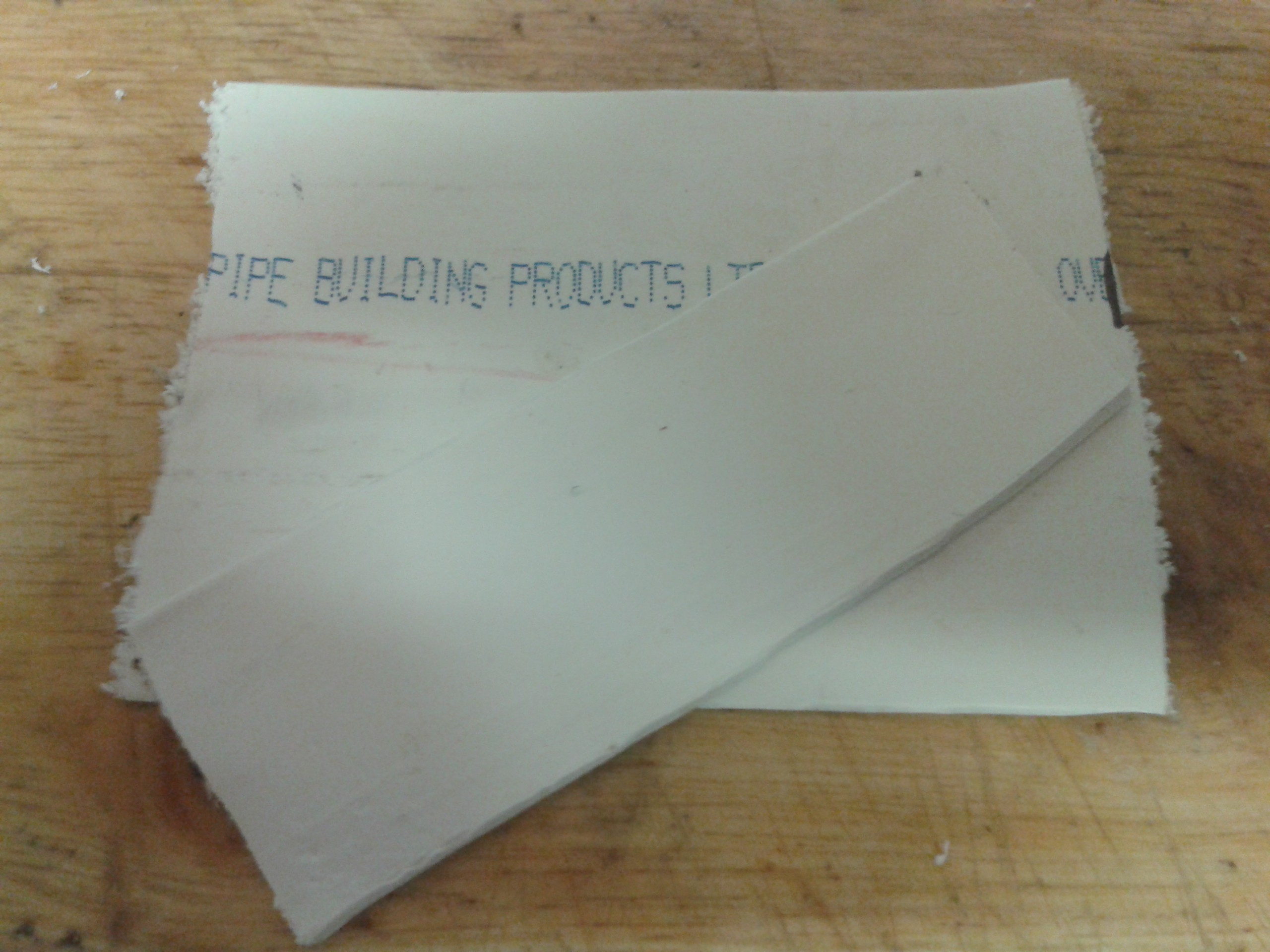
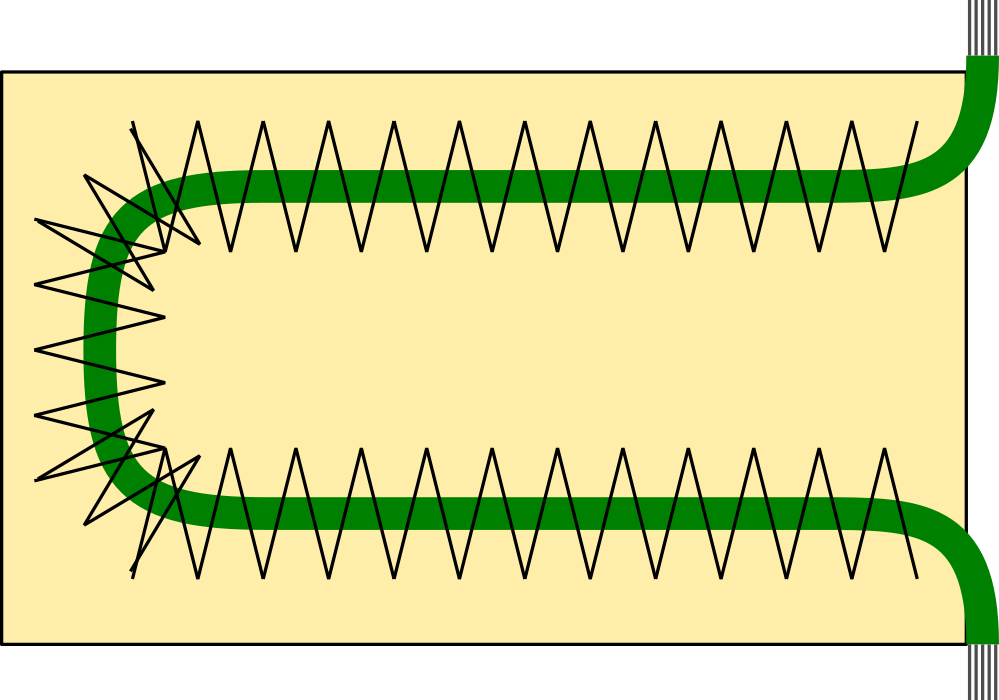
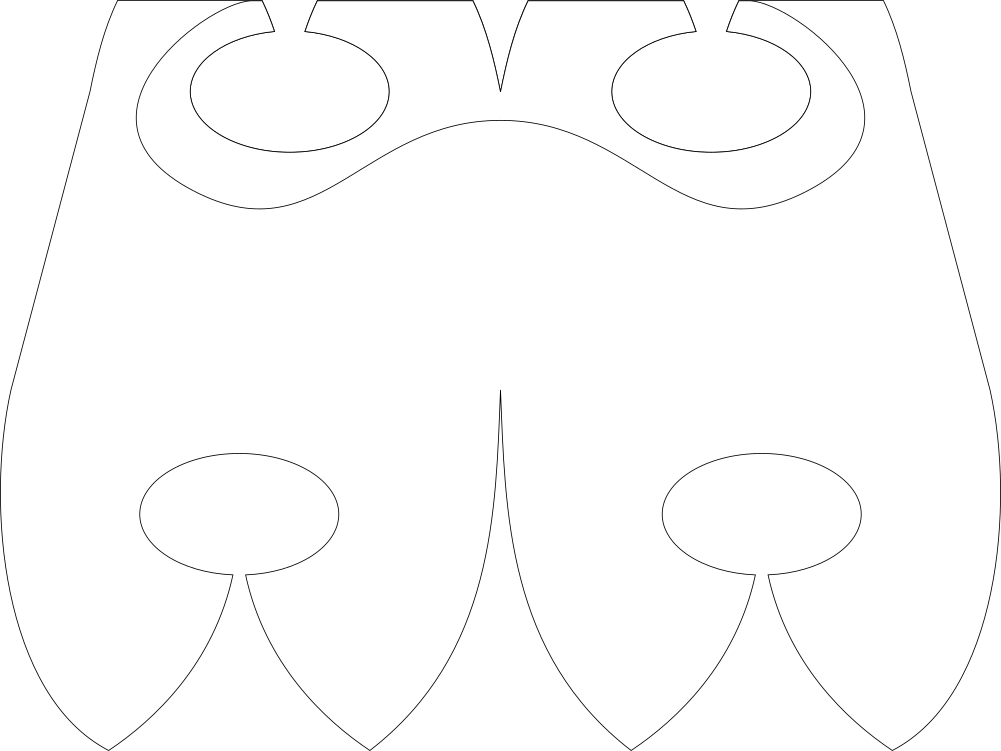
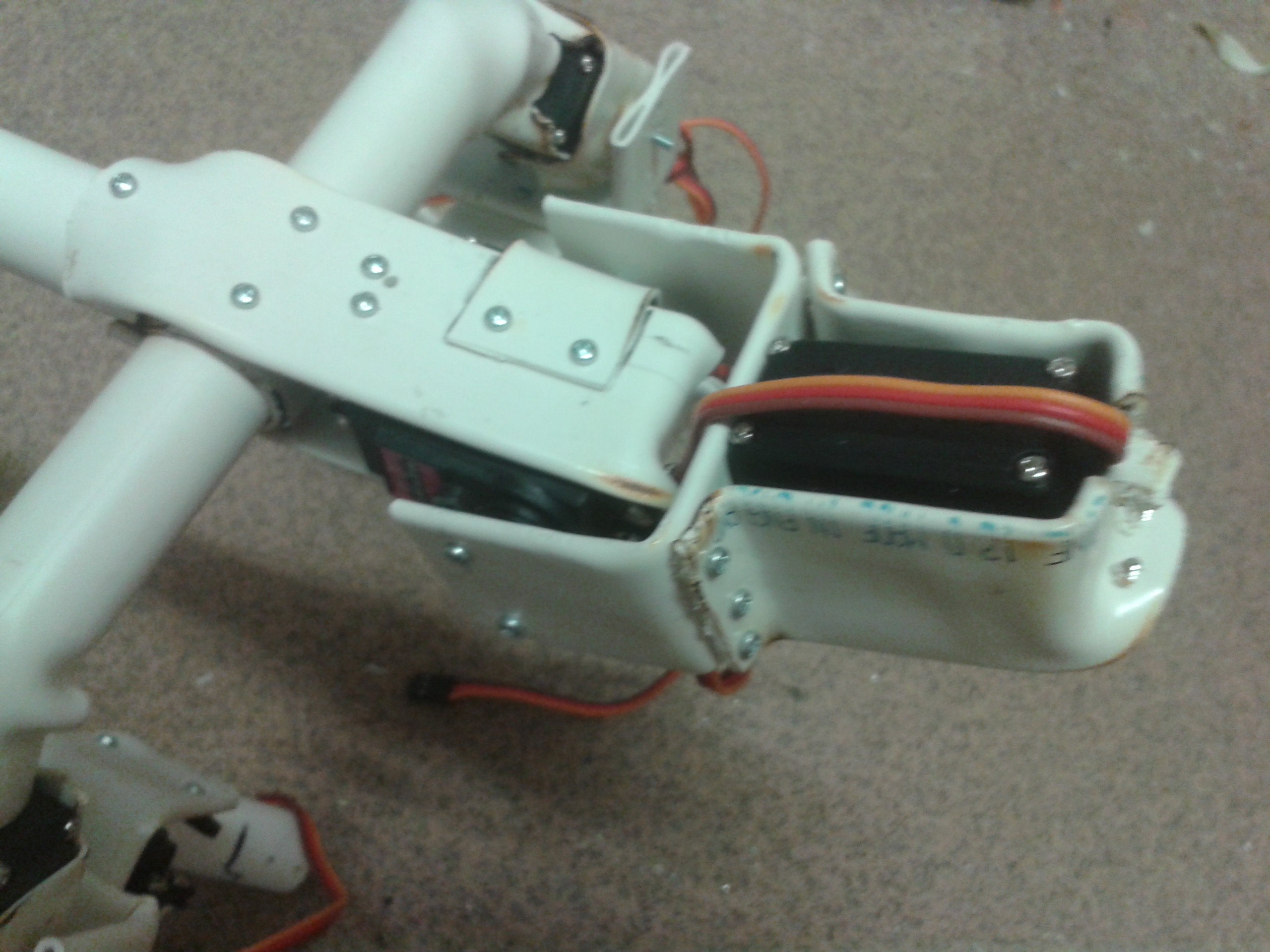
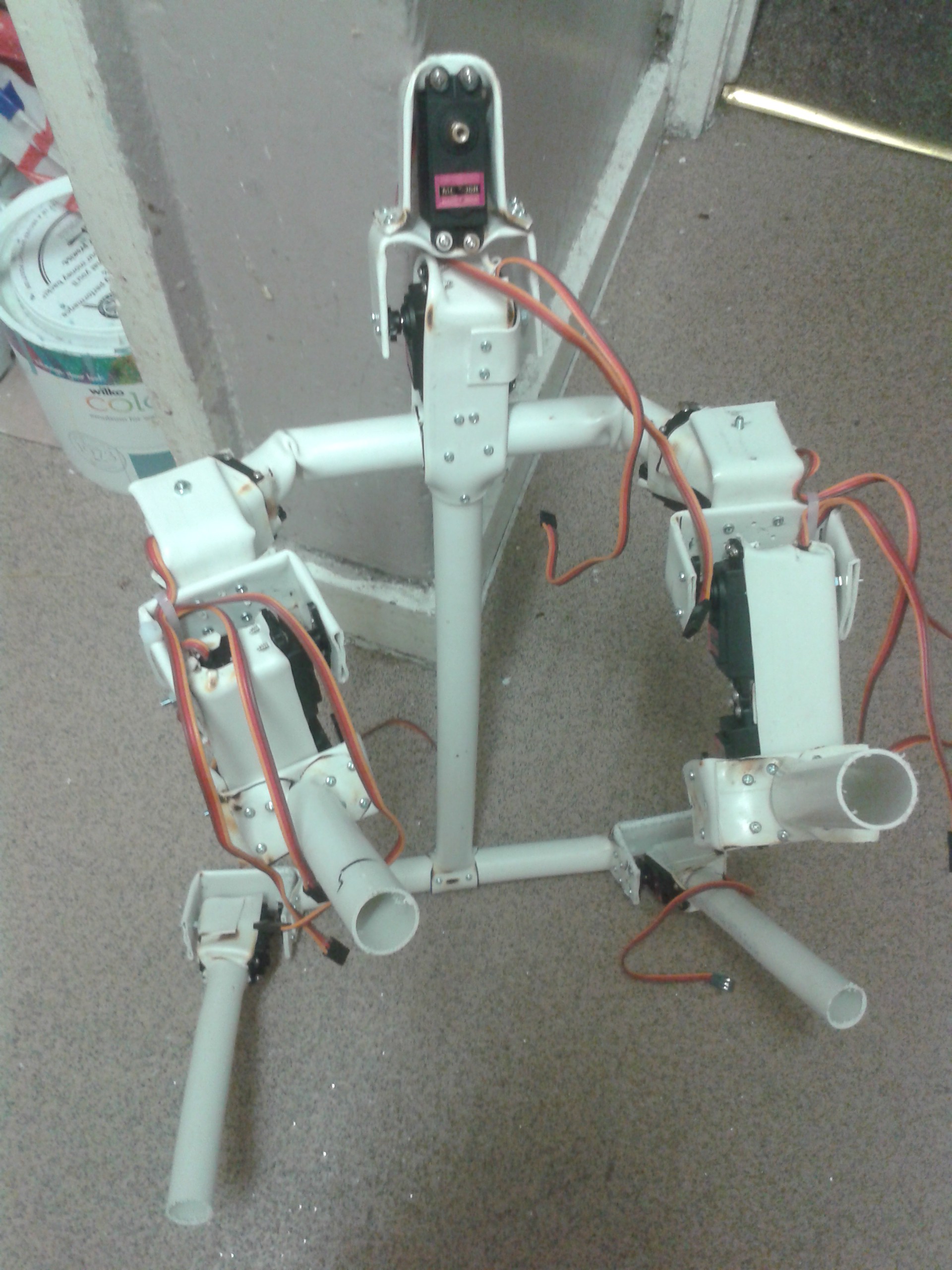
 Yeah there's some sharp edges there alright. XD
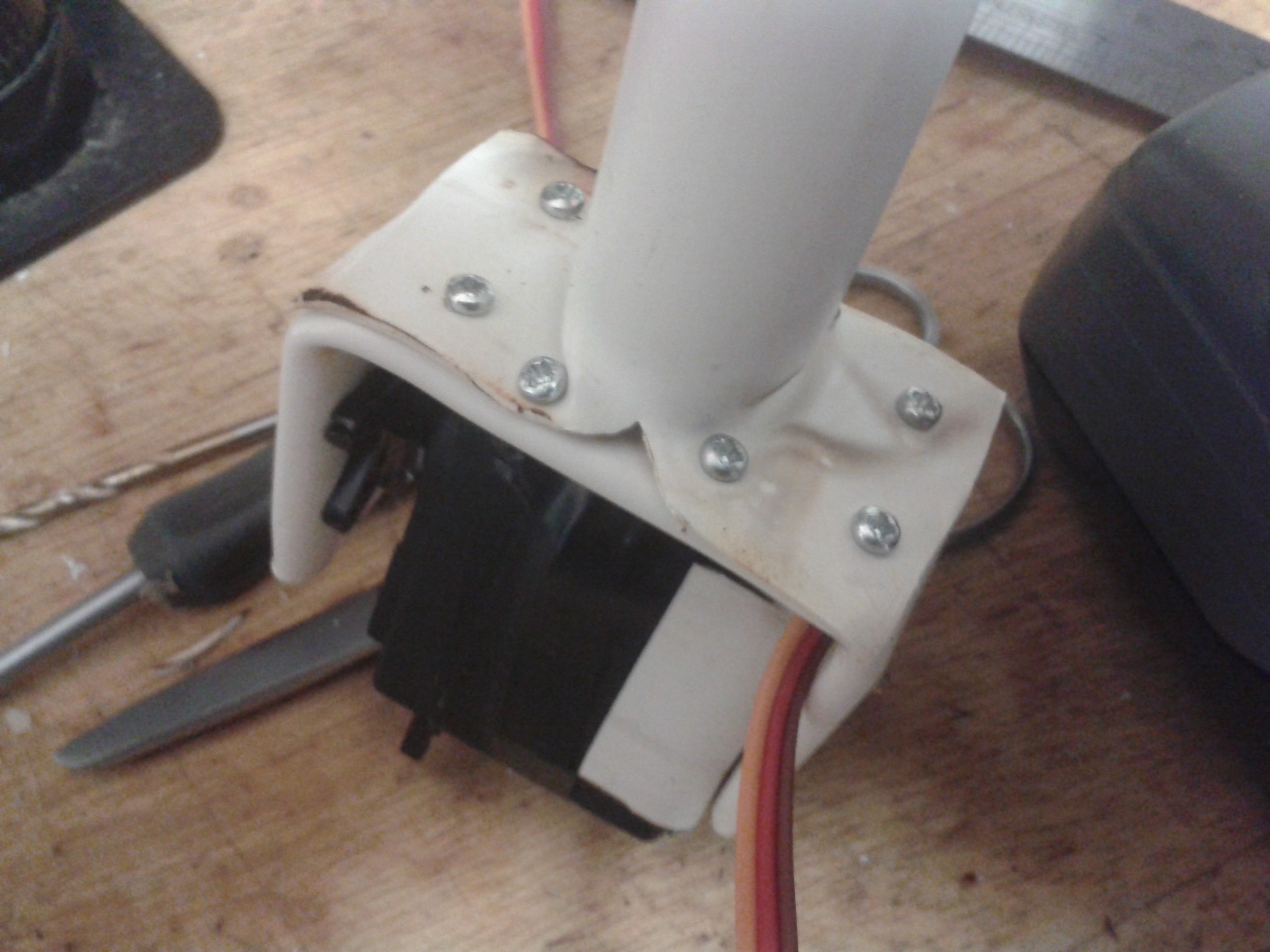
Yeah there's some sharp edges there alright. XD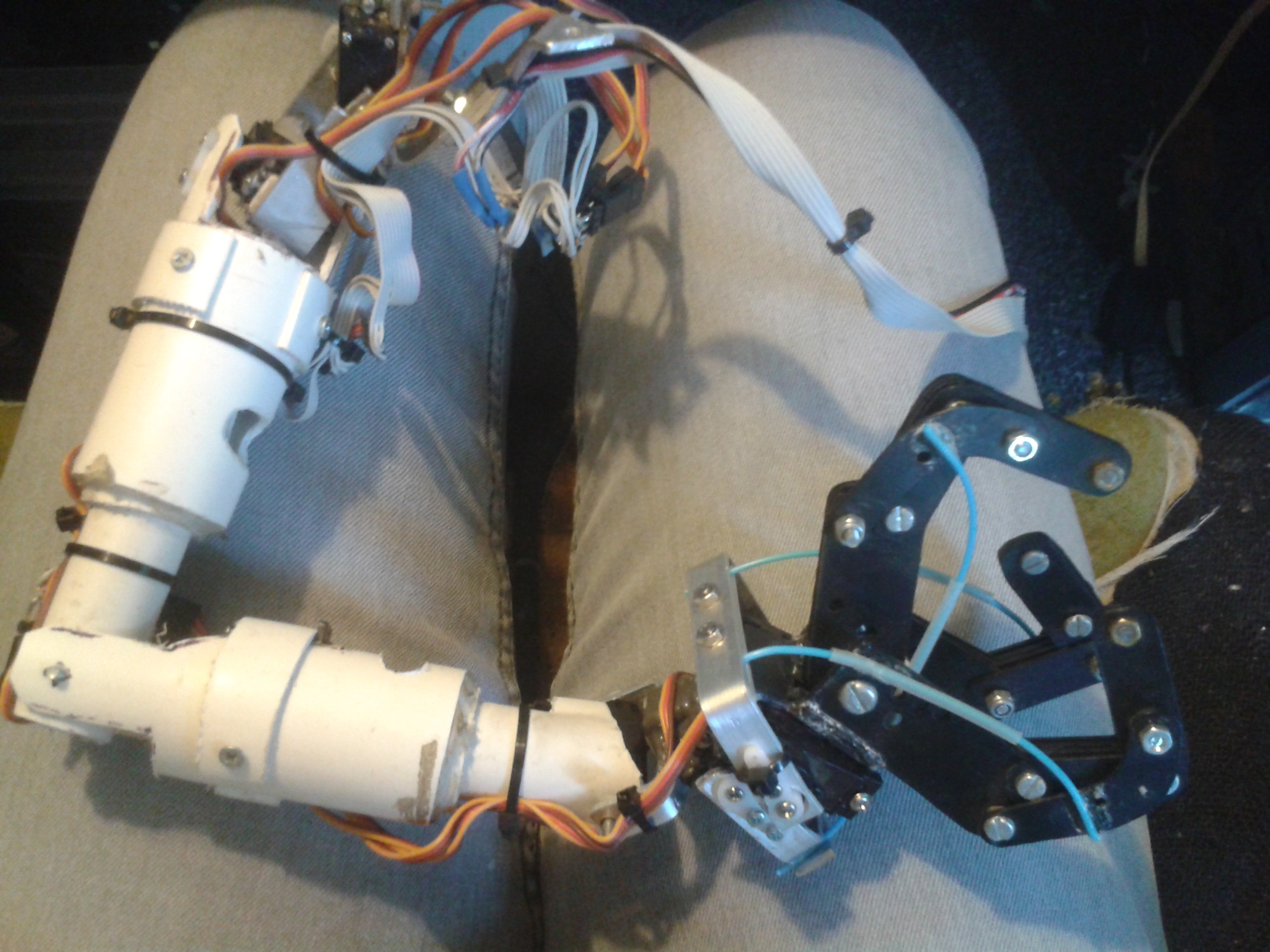 AIME's arm with Gripping Hands.
AIME's arm with Gripping Hands. What I learned from heating and cutting the pipe, I put into practise. The material retains all its former strength no matter how many times you heat and form it, but it is possible to tear the stuff as it doesnt stretch or expand during heating.
What I learned from heating and cutting the pipe, I put into practise. The material retains all its former strength no matter how many times you heat and form it, but it is possible to tear the stuff as it doesnt stretch or expand during heating.








 Timescale
Timescale
 Jim Heising
Jim Heising
 Paul Crouch
Paul Crouch
 MasterOfNull
MasterOfNull
Very ambitious and interesting, it always amazes me how diverse intellectually this community really is :)