 Halek
HalekSubsystems/Core Features
- Structure
- Shell- Each of face of Nautilus’ shell will be constructed individually from sheet metal or will be high quality 3D printed. This is cubic in shape.
- Hatch- One face of the ROV, the “hatch,” will open to allow easy interior access.
- Shelves-All inner components will be placed on a shelf system which will allow for easier and quicker access.
- Waterproof- Of course the entire shell will be watertight, including the closed hatch.
- Power
- Battery- Lithium polymer batteries will power the system.
- Electronics
- Raspberry Pi- A Raspberry Pi will act as the brains of the entire ROV
- LEDs- Super bright LEDs will illuminate dark underwater environments.
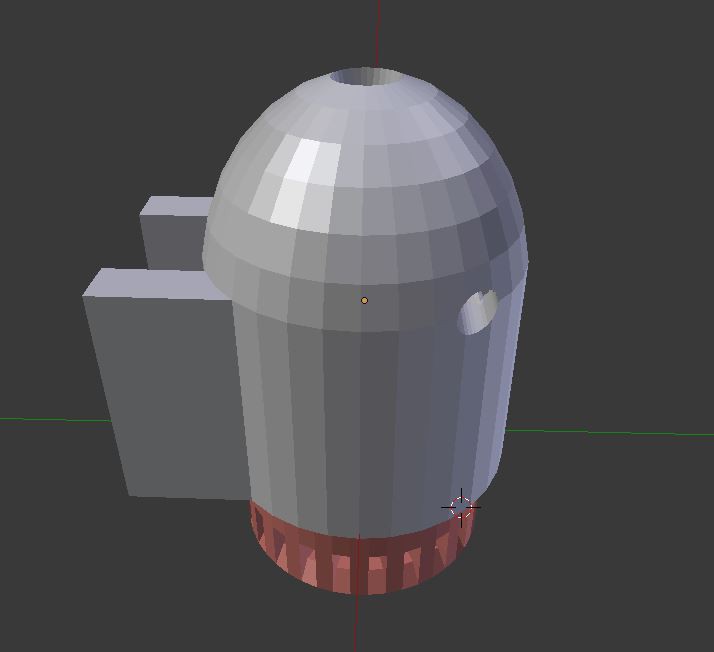
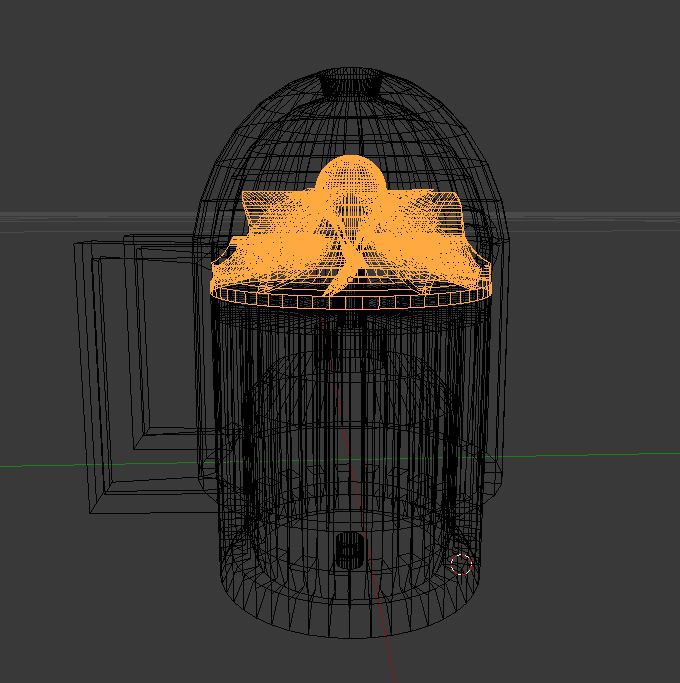
- Motion
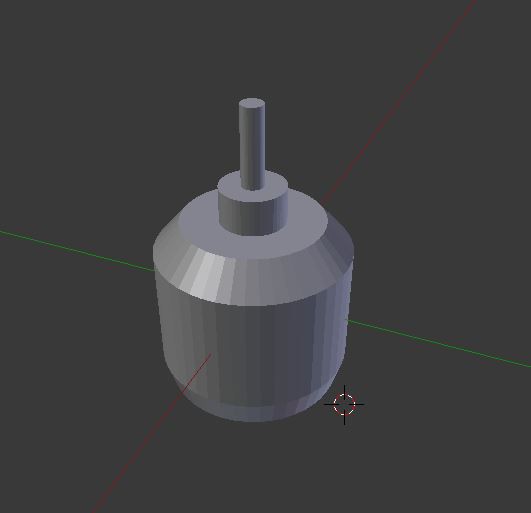
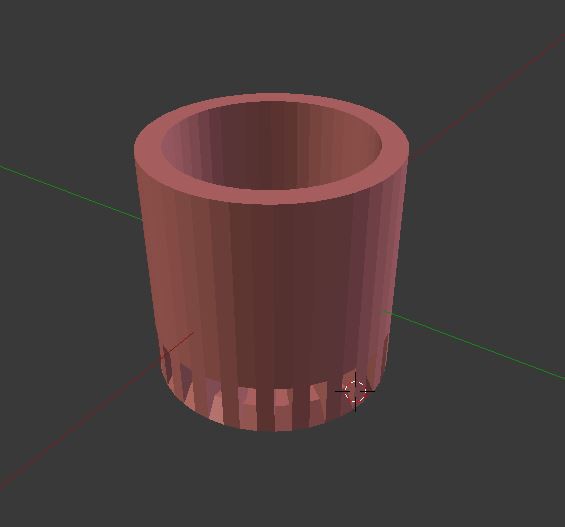
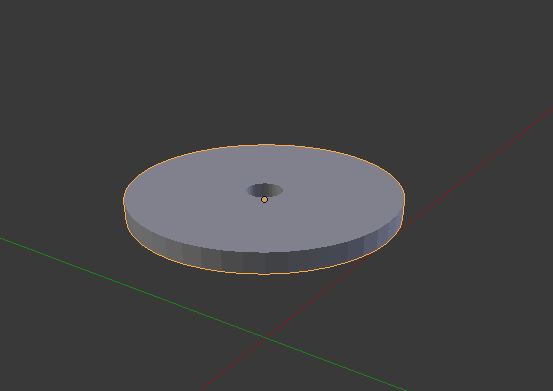
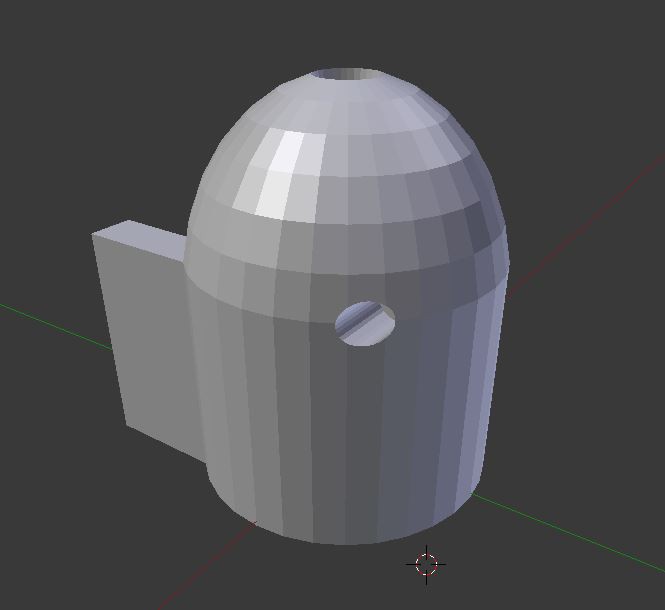
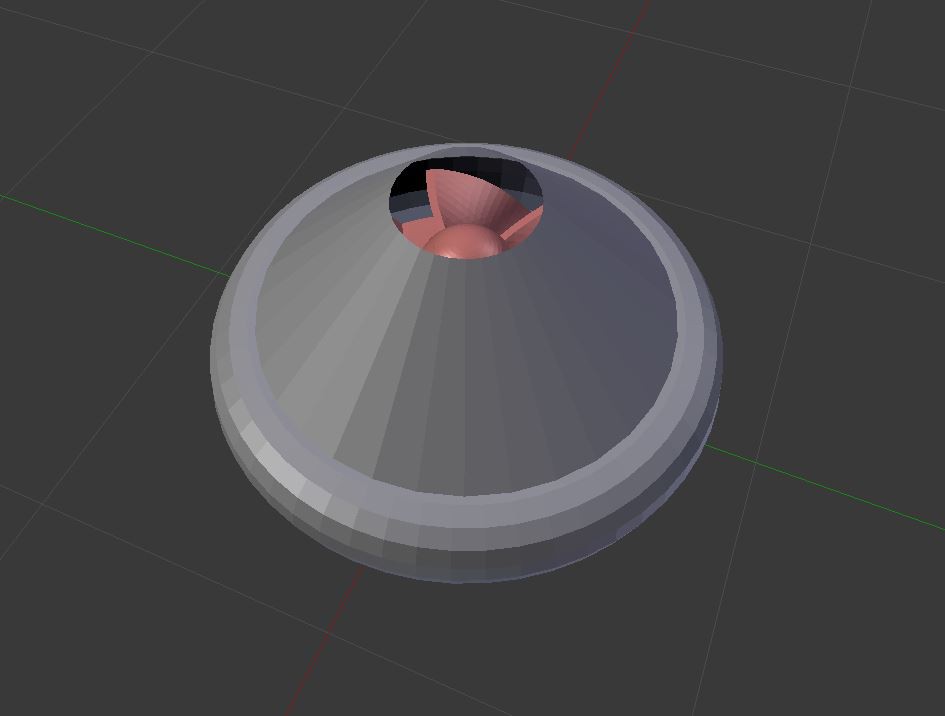
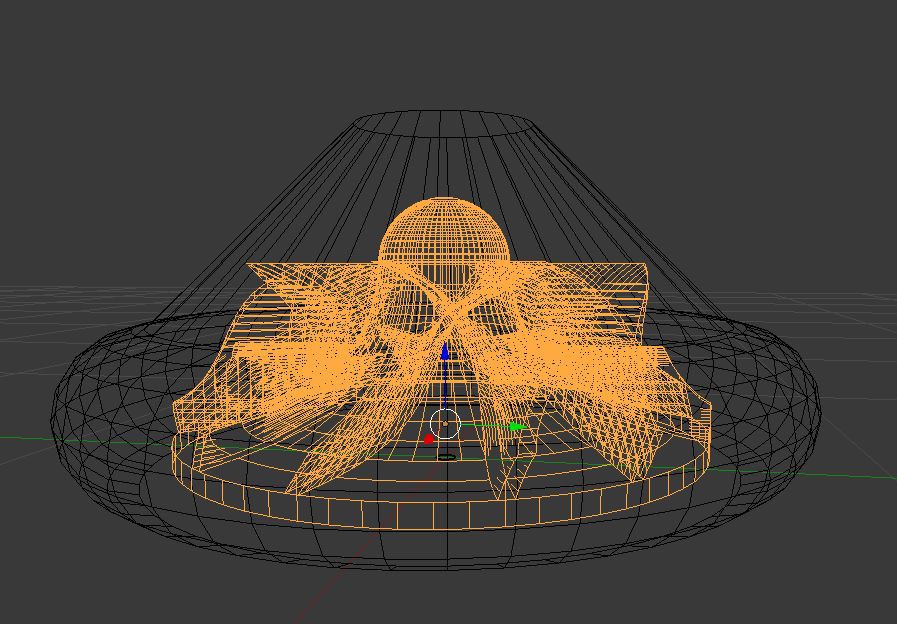
- Motor/Hydrojet- A set of motors will be used to power high pressure pumps which will allow for upward and forward motion. This starts with the idea of a centrifugal pump. A centrifugal pump uses an impeller to create a vacuum within it's housing, allowing for a fluid of some type to be drawn into the pump. As the fluid hit s the impeller it is shot radially outwards to the housing and is spun around rapidly. The impeller then pushes the fluid up through another opening; here is where the water jet propulsion comes into play.
- Reaction Wheel- In order to turn the forward motion into leftward or rightward motion, a reaction wheel will be used to to rotate the craft along the z axis. A reaction wheel basically creates an internal torque, and in order to compensate (conservation of angular momentum) the entire ROV reacts with a torque in the opposite direction.
- Sensors
- Sonar- Terrain mapping
- Camera- TImelapses and photos
Everything is subject to change based on time, funding, my skills, and available space.



 Alan Cyr
Alan Cyr
 Md. Moniruzzaman
Md. Moniruzzaman
 Anteneh Gashaw
Anteneh Gashaw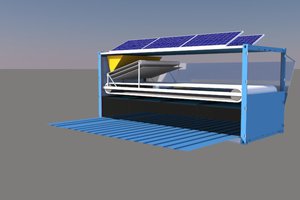
 ken.do
ken.do