 Laio Athos Nevar Fonseca
Laio Athos Nevar FonsecaYeap, it's on paper!
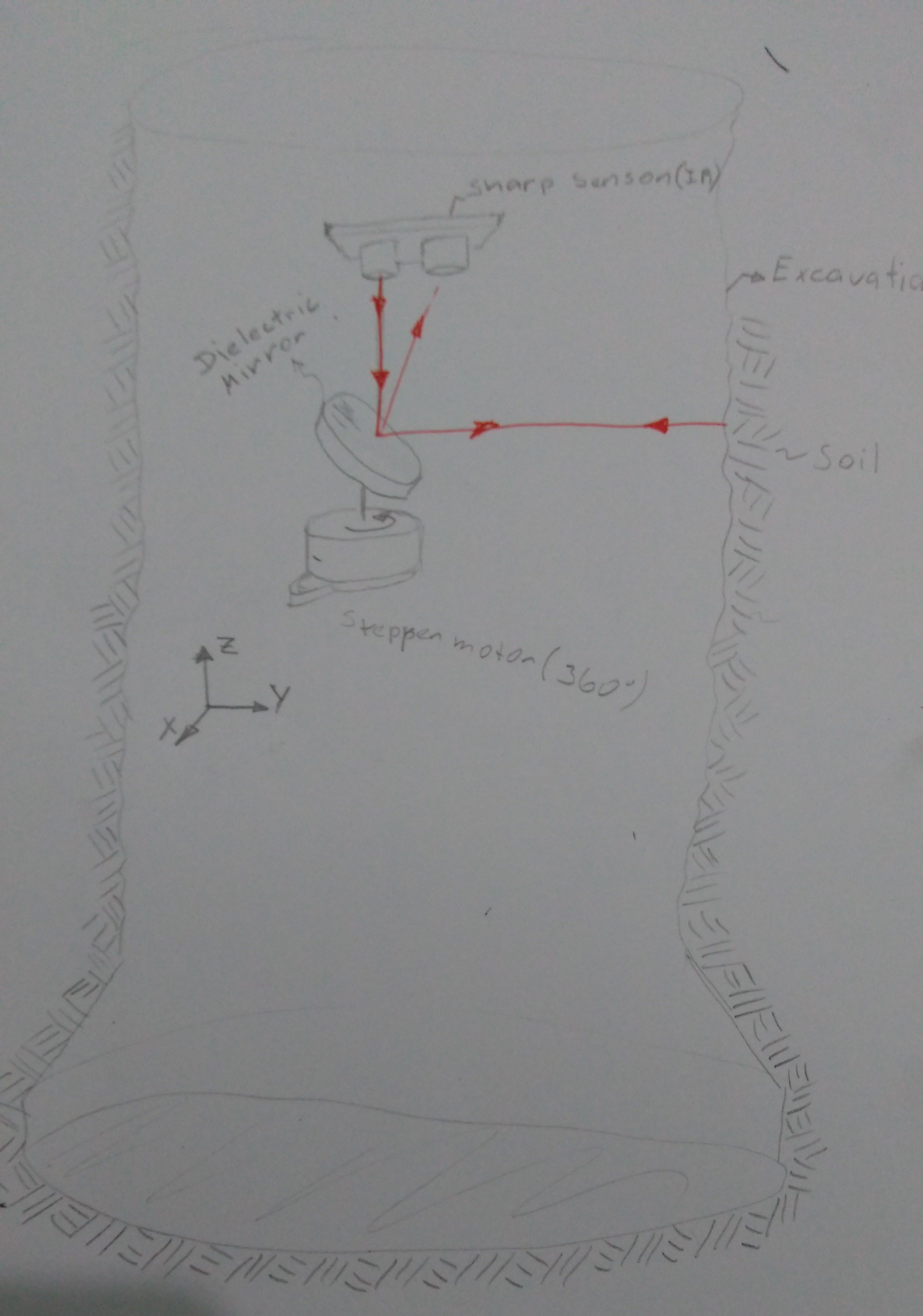
Here I show the main parts about the internal work flow.
The original idea was using a Kinnect sensor(Xbox 360) to make a point cloud but it's demmand a hard processing time. So, to do the simple, I changed this to a own laser scanner.
How it's run:
The IR(Sharp sensor) beam will be reflected on a rotating(stepper motor) dielectric mirror. The result is a meassure X,Y on 360º.
Therefore, I have to solve the problema in Z axis. Maybe I use a servo motor or other stepper motor to control up and down on the hole.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.