 Laio Athos Nevar Fonseca
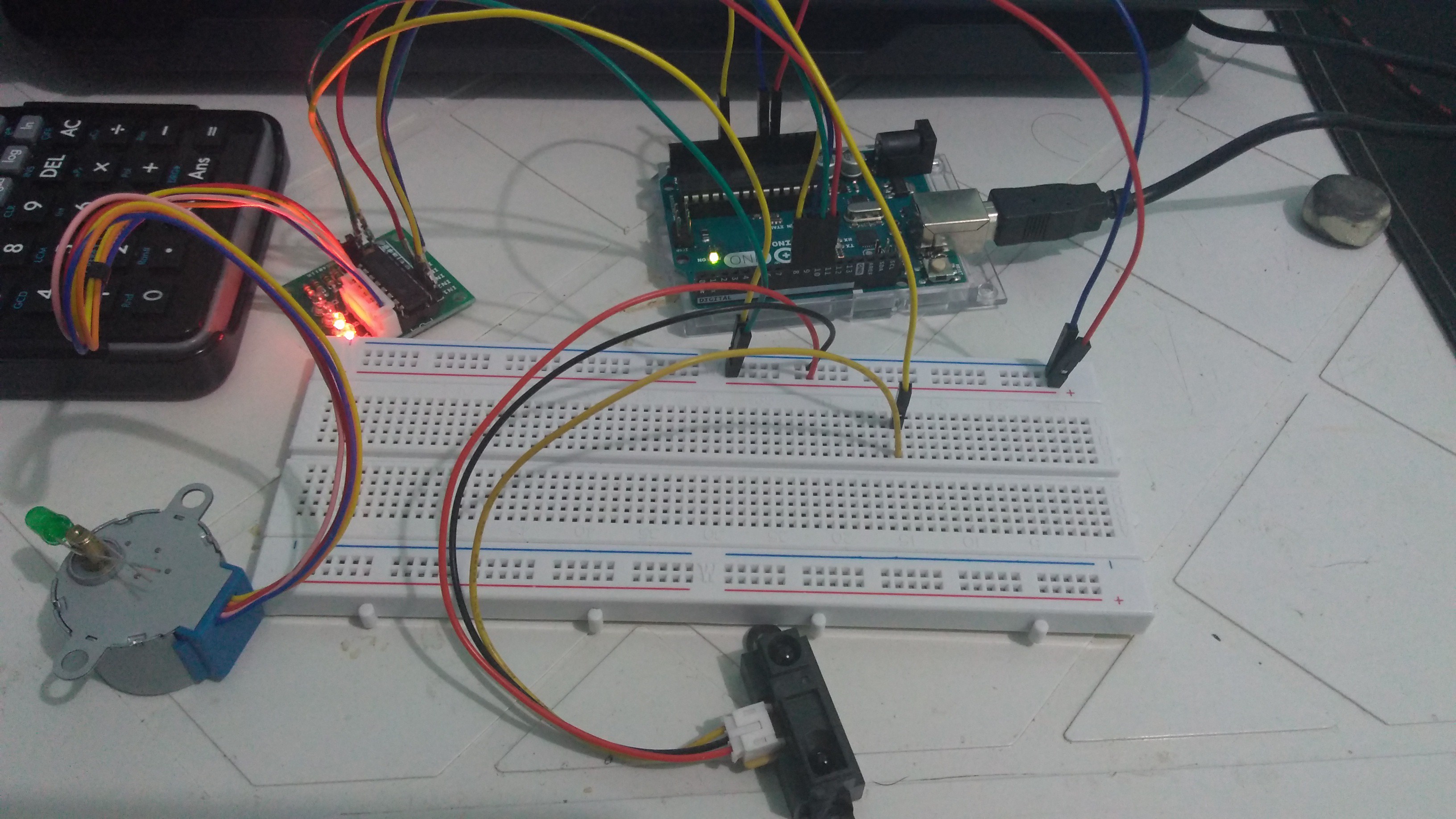
Laio Athos Nevar FonsecaToday I'm writing the code and testing the integration of the Sharp sensor with the Stepper motor. Apparently, that's ok. I need to do more testing.
The conection it's simple and I don't want to keep a lot of wires now.
I need to verify the basic assembly.
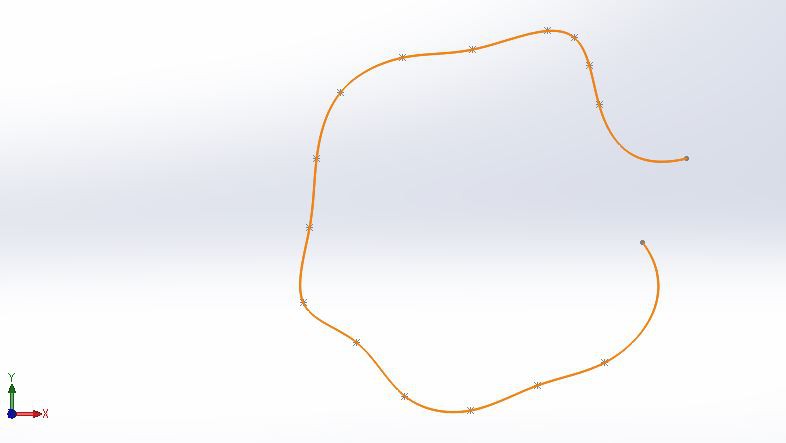
With this simple assembly, I get the first turn of points. And I inserted into a CAD program.
I'm devoting my time thinking about the concept of Taipei and how I'm going to solve the pendulum in my project.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.