0%
0%
Resinified Quad Copter
Raspberry Pi 3 and PXFmini Quad Copter running on resin.io
 Joe
JoeBecome a Hackaday.io member
Already have an account? Log in.
Just one more thing
To make the experience fit your profile, pick a username and tell us what interests you.
Pick an awesome username
hackaday.io/
Your profile's URL: hackaday.io/username. Max 25 alphanumeric characters.
Pick a few interests
Projects that share your interests
People that share your interests

 (Hot spot switch)
(Hot spot switch)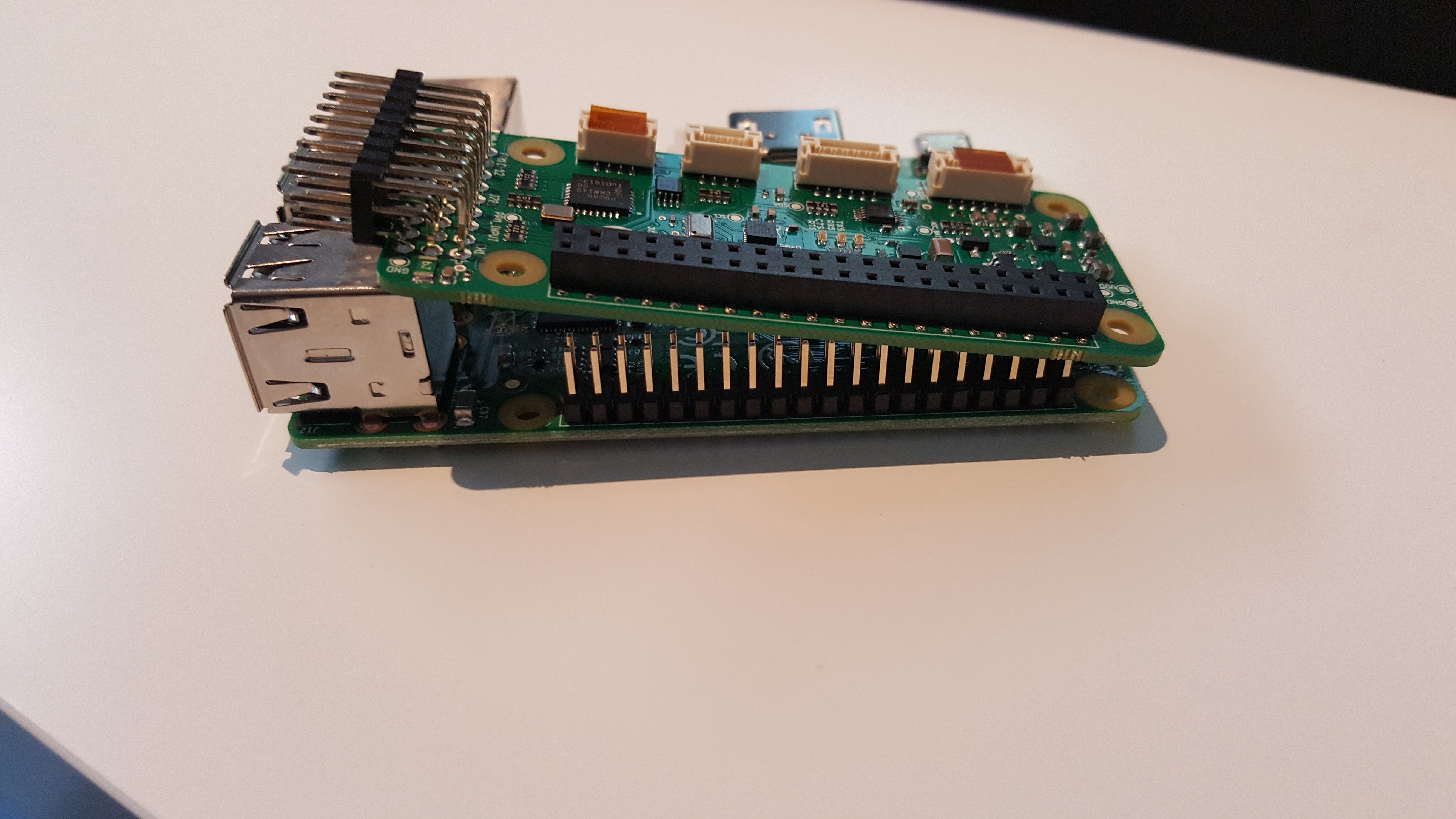
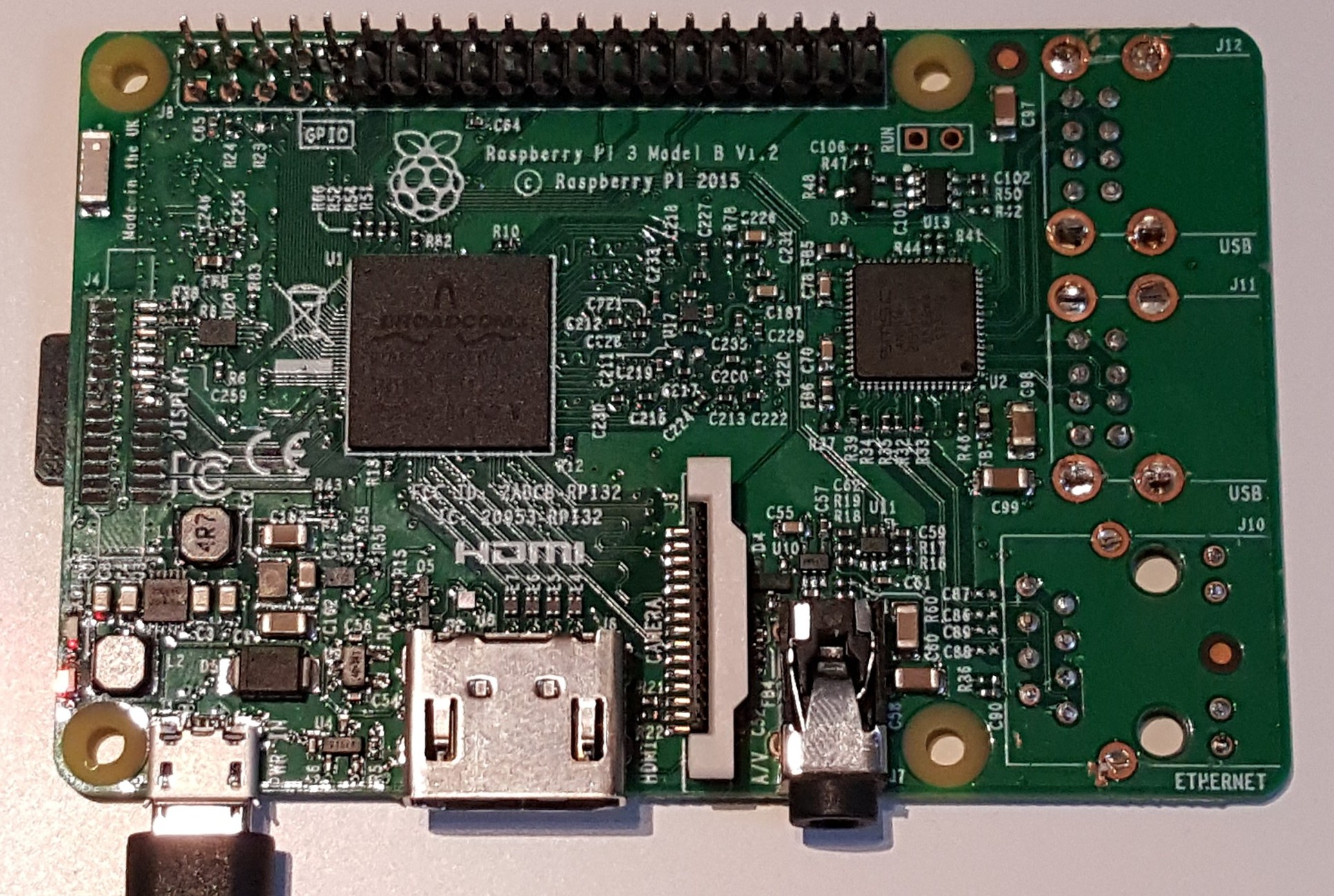
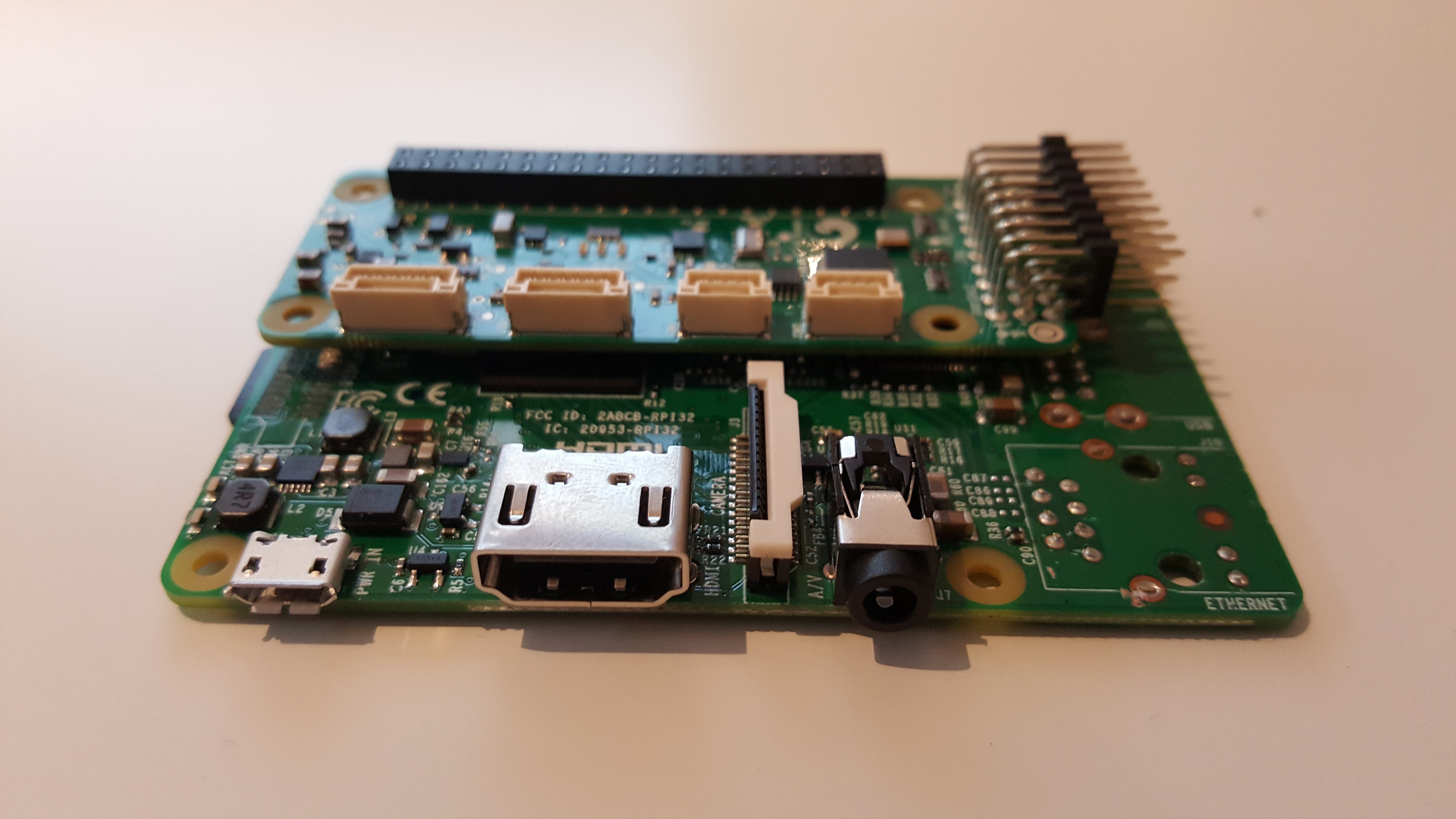
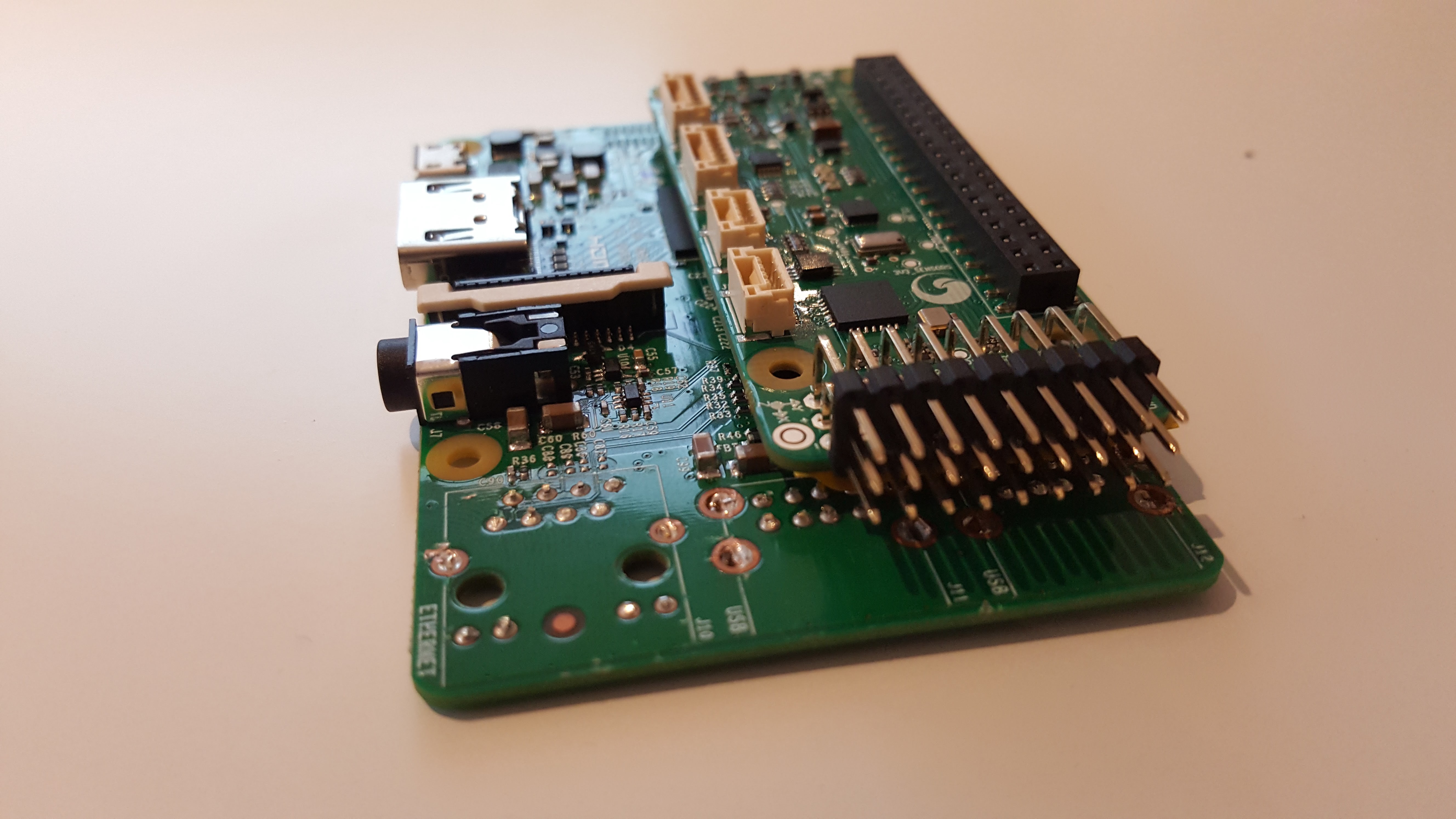
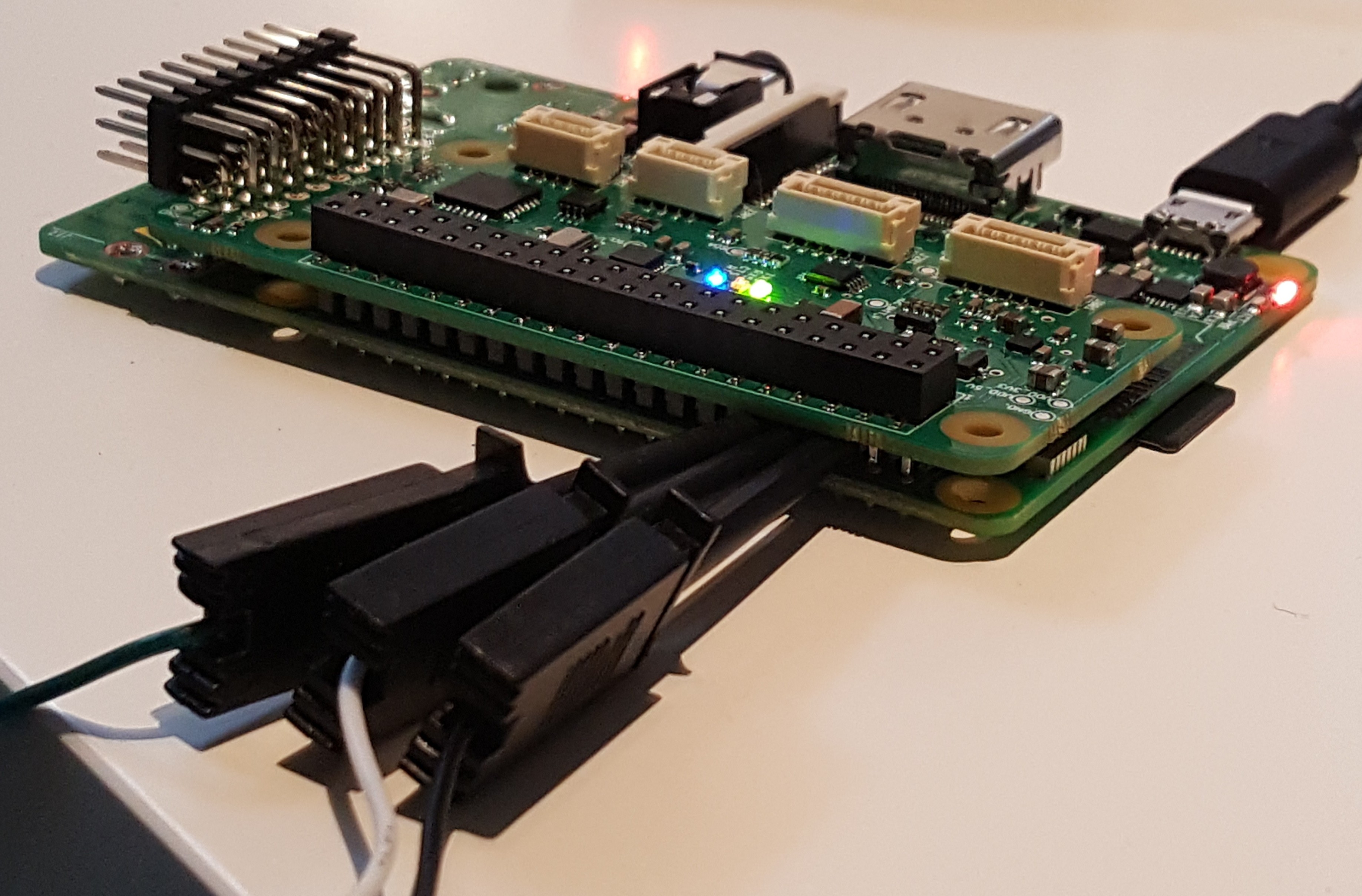
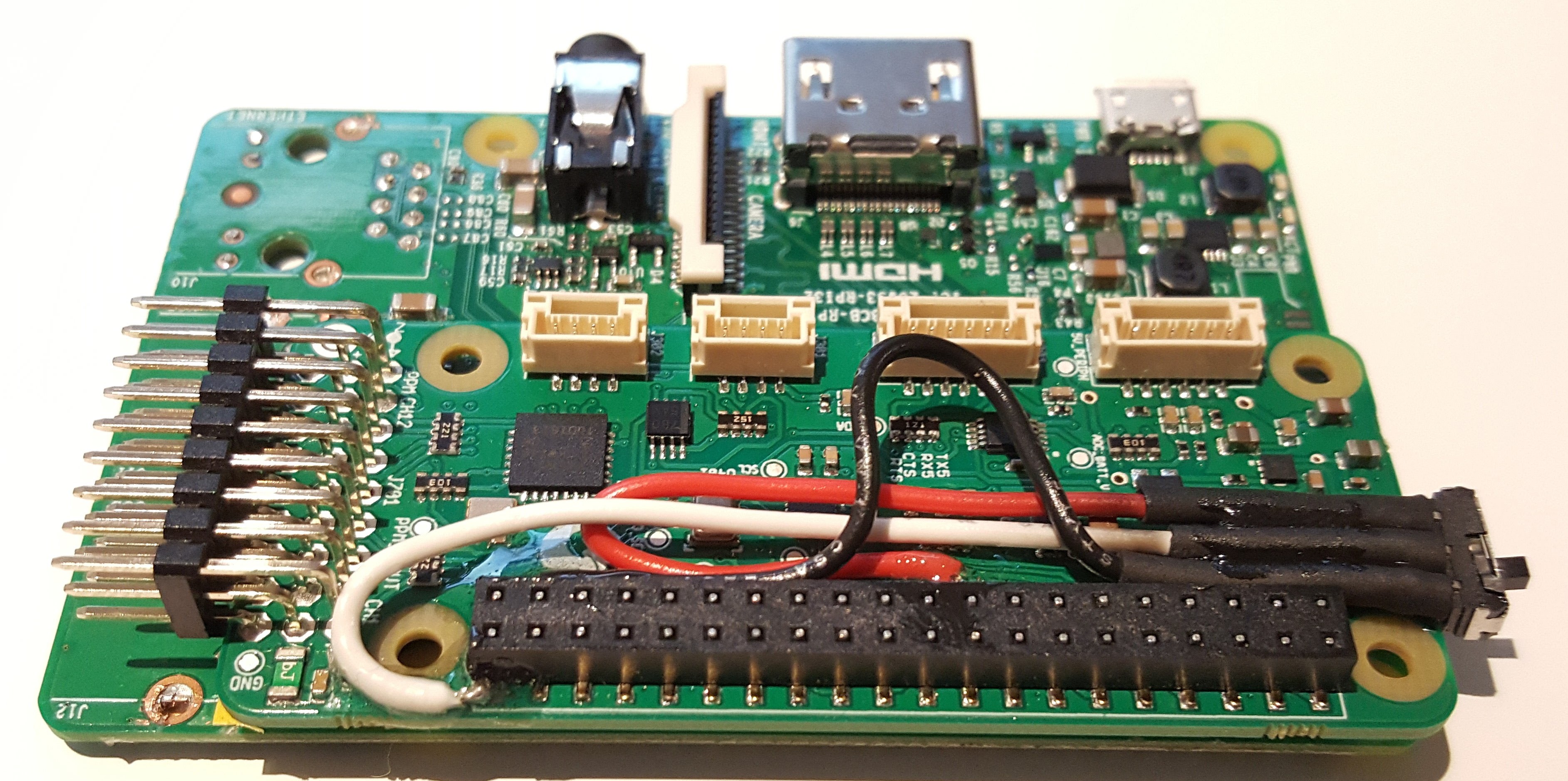
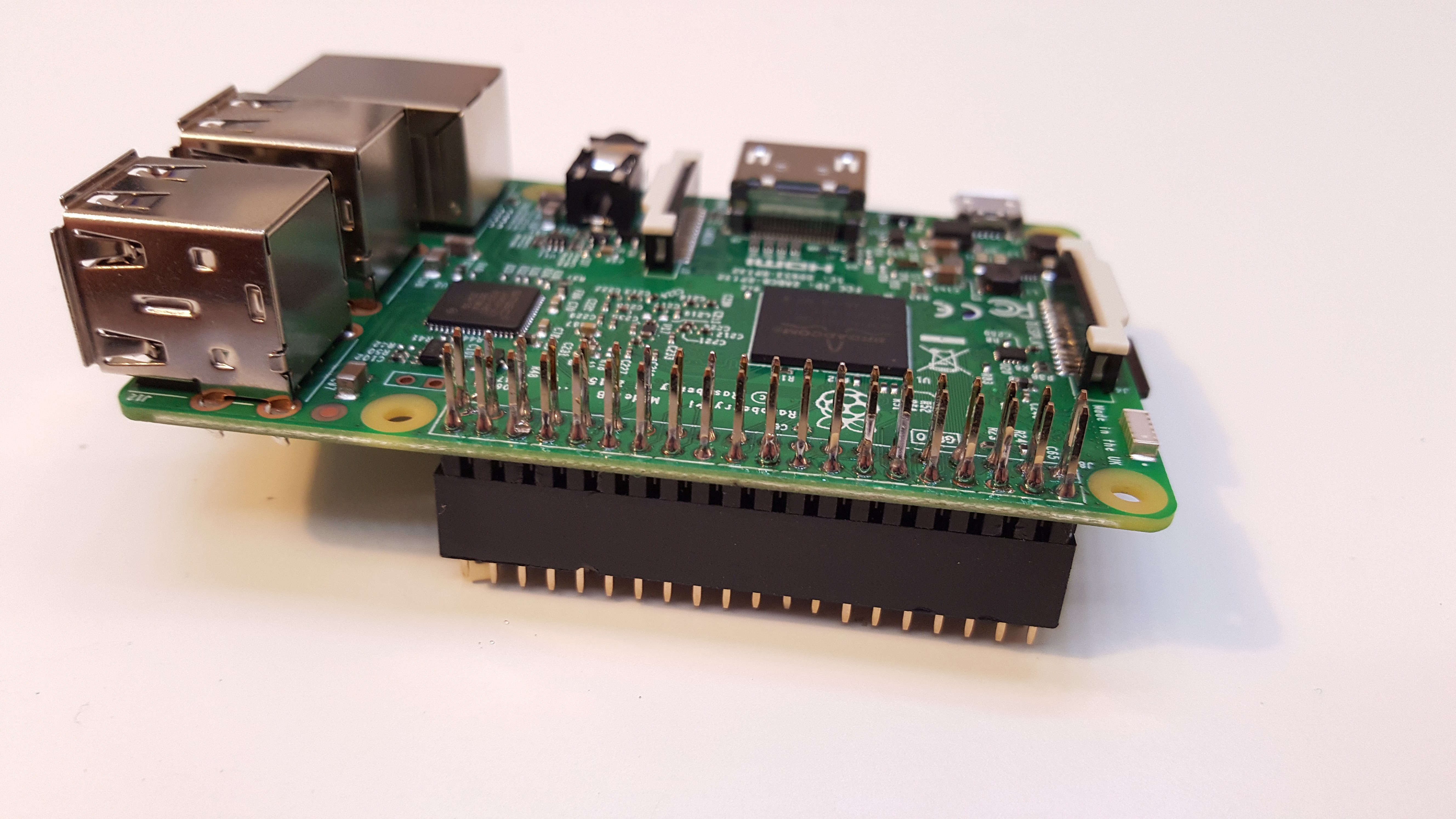 (RPi3 with the GPIO pin header stack soldered in)
(RPi3 with the GPIO pin header stack soldered in)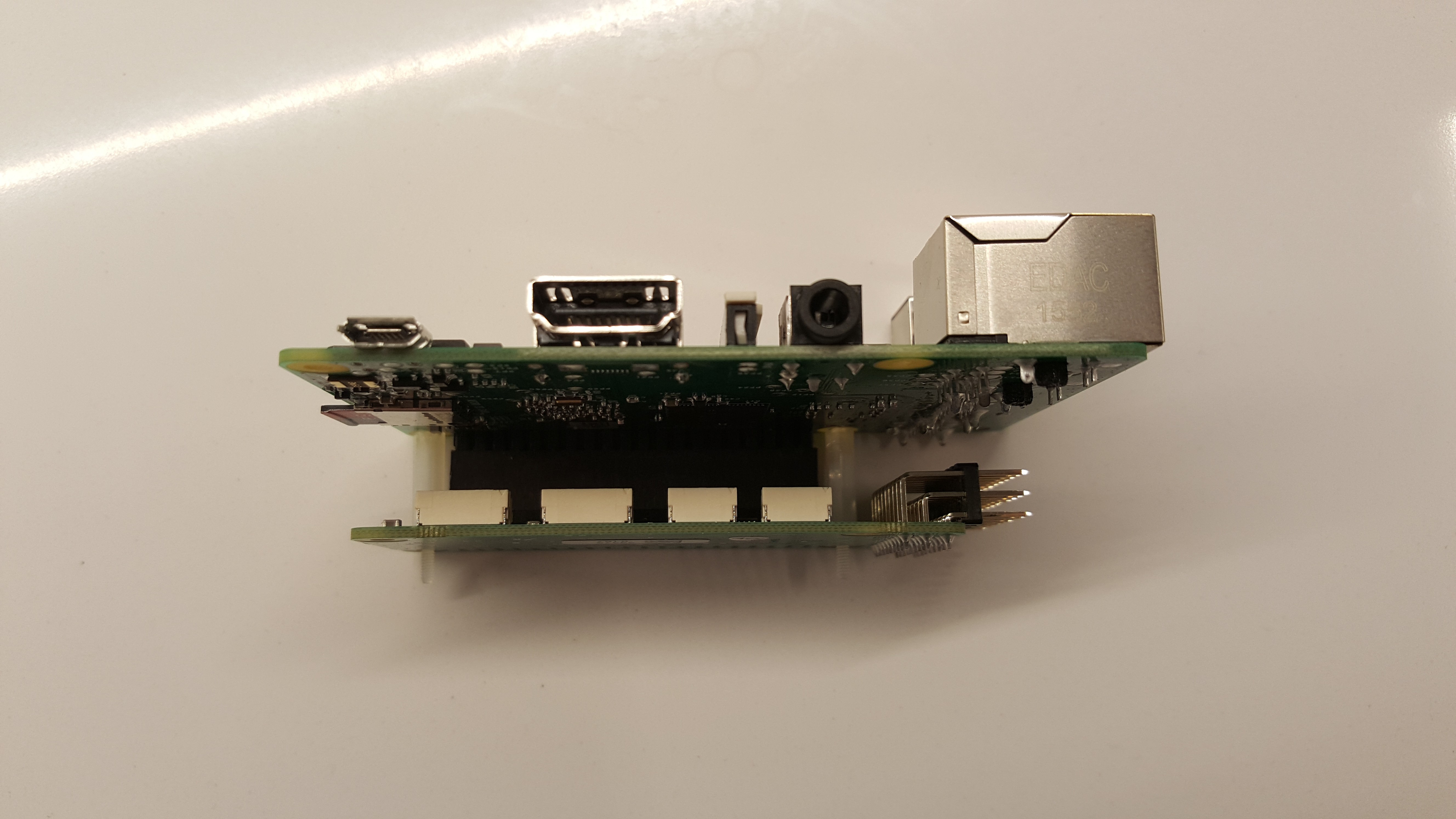

 (Frame with the motors mounted)
(Frame with the motors mounted)

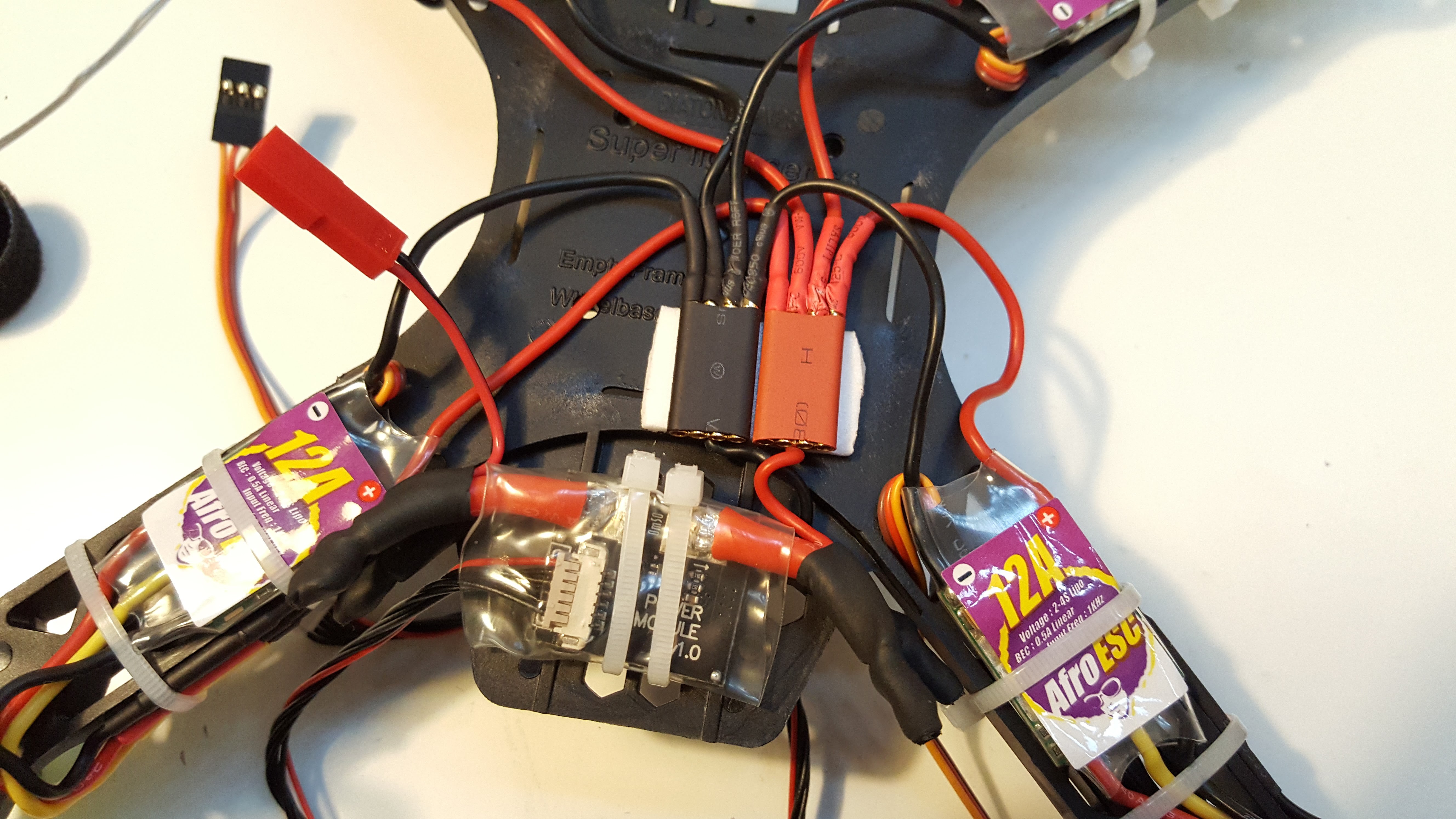 (Main power distribution bus held on with zip ties and double sided tape)
(Main power distribution bus held on with zip ties and double sided tape)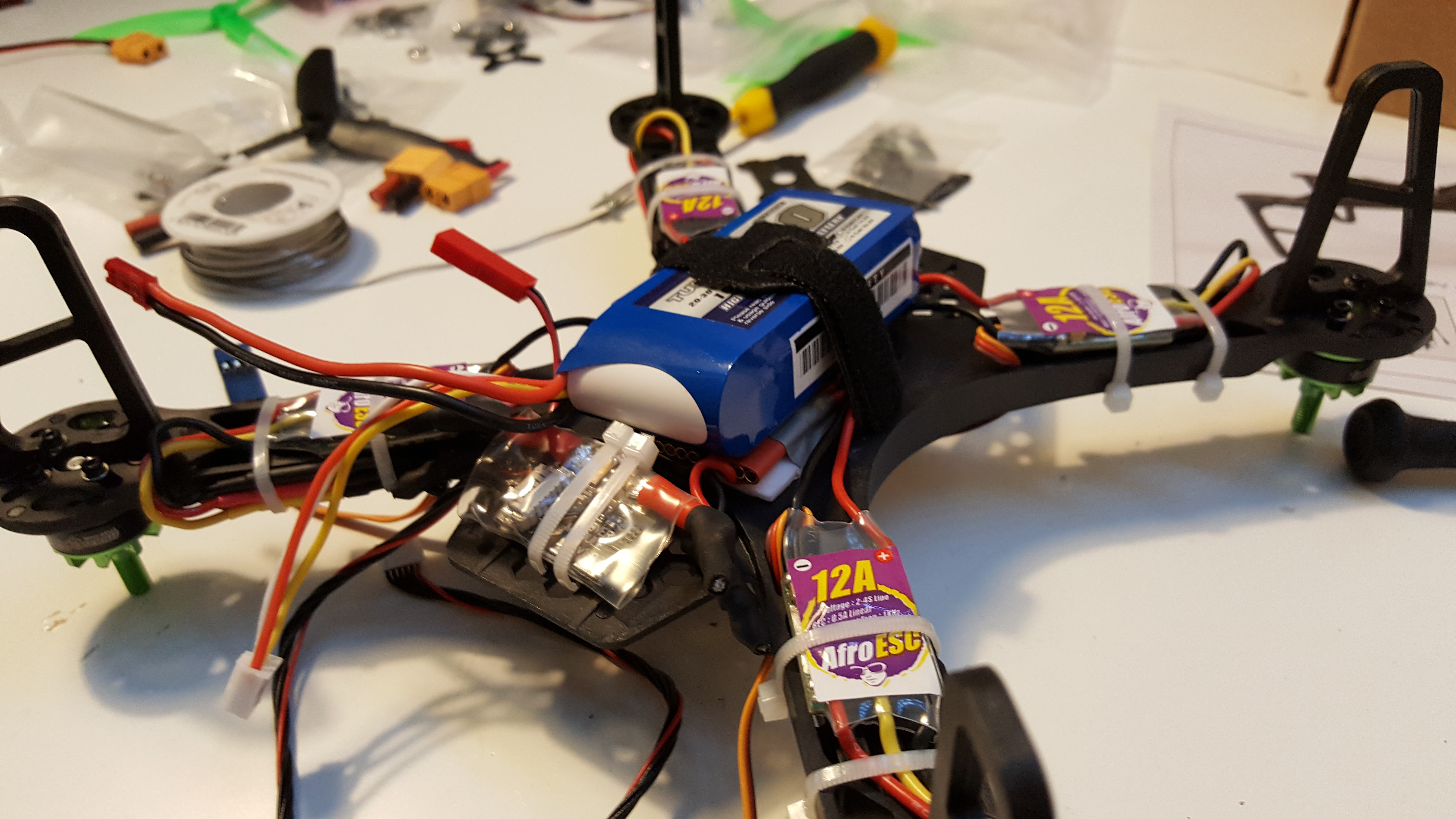

how much is the estimated cost?