 Justin Maynard
Justin MaynardThe Challenge/Problem
So the problem was I’d previously started a small robot car build using one of the cheep 4WD chassis available on Banggood with my youngest daughter.
I got a couple of dual motor drivers from Sparkfun and Particle photon I already had and got soldering. Bejesus the number wires & the number of pins used on the micro just to get 4 motors running didn’t leave much free for sensors and other gizmos.
I had a quick look at available “robot driver boards” There aren’t that many for the 4 motor chassis and there ones that are around aren’t for the current generation of wifi enabled micros.
The Solution
If the first rite of passage for micros is blinking a led, the next one (once you have kids) is creating your own robot driver board.
So this boards’s minimum requirements are.
- Support the FeatherWing spec so you can use ESP2866, ESP32 or the new particle.io boards etc.
- Drive 4 motors.
- Use minimal pins on micro (perhaps I2C)
Other features or sensor inputs are a bonus.


 Sean Hodgins
Sean Hodgins
 Juan Miguel Jimeno
Juan Miguel Jimeno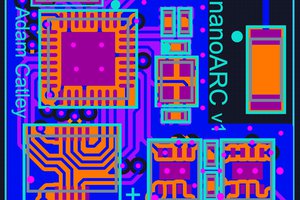
 adamcatley
adamcatley