 Walter Dunckel
Walter DunckelLast night I found simplified kalman filtering code for arduino here: http://orlygoingthirty.blogspot.com/2013/06/1-dimensional-kalman-filter-arduino.html?m=1 and added it into the project. It seems to work very well at smoothing a static altimeter, and doesn't bog it down like oversampling does.
Also got data logging to work from RocketNXP.pde. It now appends to a data.csv file, recording attitude and altitude.
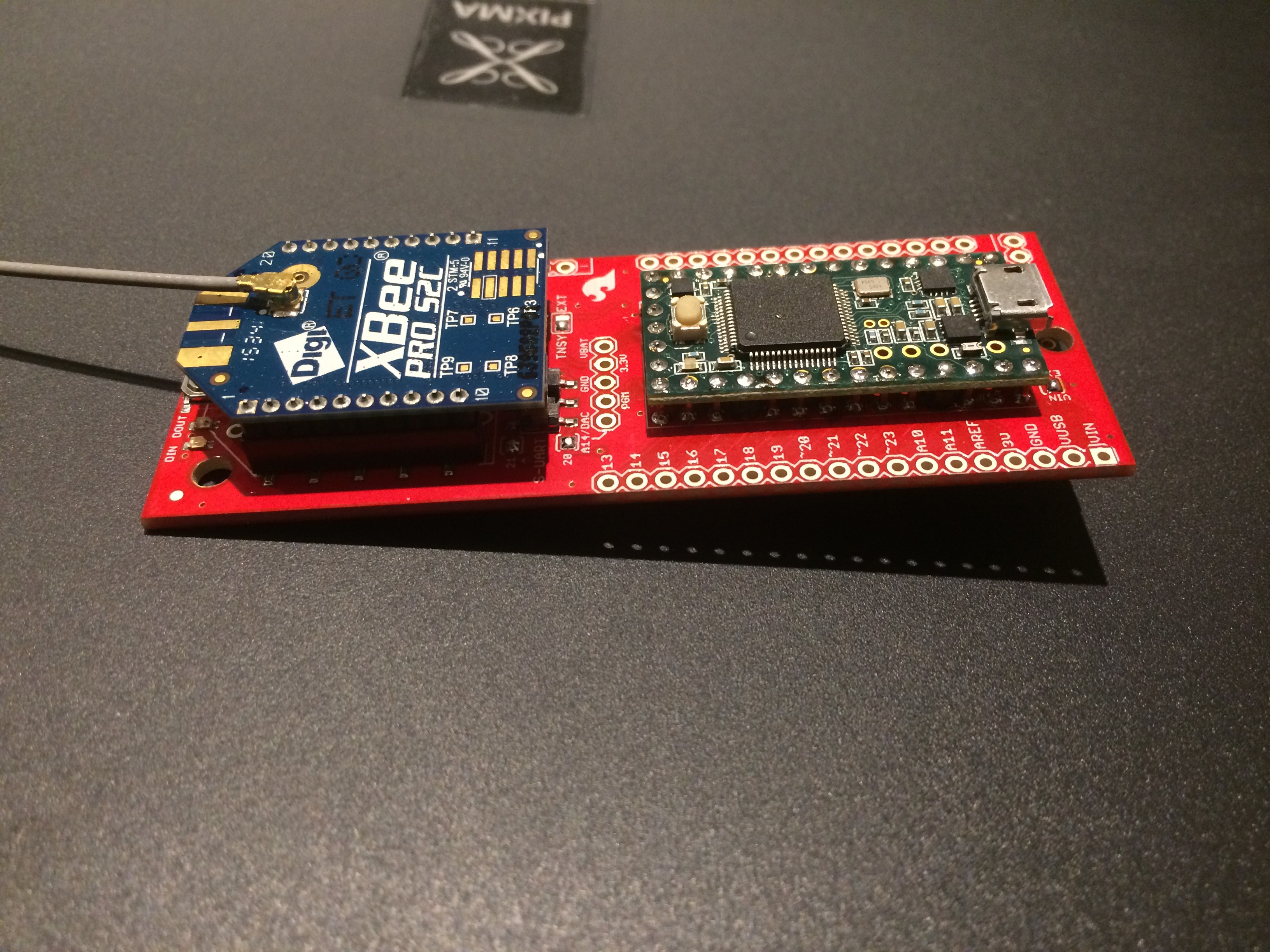
Today I received some backup hardware from Sparkfun. I did this mostly to make my hardware a little more compact, and save a little weight. Right now it sits at 0.8 ounces without the battery.
I may try to dust off one of my airplanes and see if I have any good lipos to fly the sensor around. Hopefully I can do a test run this weekend, while I wait, and wait ... for a legal rocket launch. There is plenty more for me to do. My to do list consists of the following:
1. Add GPS
2. Graphing of flight parameters like the AltDuino does. (His is really beautifully done) ... mine probably won't be that nice, but my code will be open :)
3. Modify the processing code to be able to play back data files and show virtual rocket's attitude during flight. Could be nice to review some flights, and shouldn't be hard, just reading from file vs serial.
4. Put it in a ROCKET!
And later ... add mosfet hardware for chute deployment
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.