 Sugapes
SugapesAs soon as I got back from my trip I started working right away on the question of the slippery omni wheels not gripping very well to the XY plane, due to the plastic rollers. I was already expecting this to be an issue, I was just hoping for it to be more easily solved.
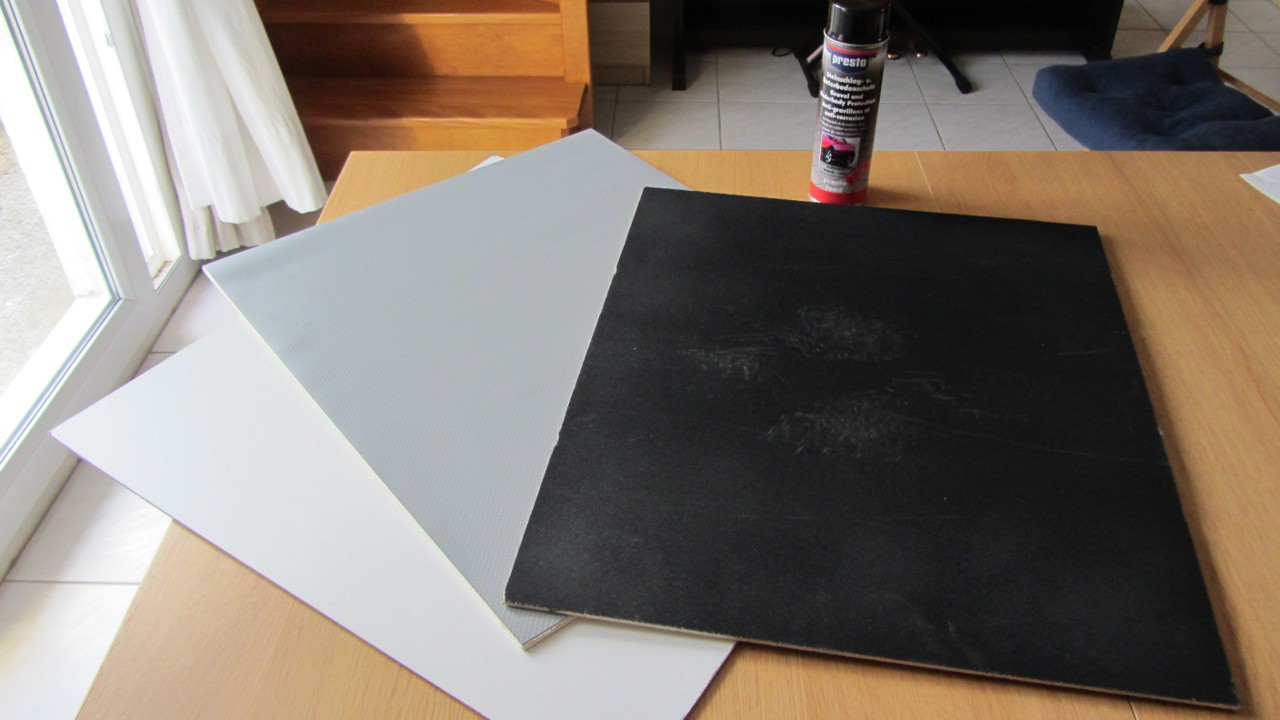
The first idea that I had was to try to increase the friction by addressing the XY plane itself, which is just some sort of light wood board for now. I tried several different strategies some of those showed only very limited success (i.e. some improvement, but hardly enough). Some of the main ones were: to simply use a melamine coated wood board which naturally has a rough side; to glue some anti slip mat (used to line drawers) to a wood board; to spray some rubber based paint on a wood board. (Picture below).
Right from the start I did notice that the wheels do seem to grip (a bit too) well to the neoprene side of my mouse pad, so in light of the limited success of my previous attempts, I decided to order some neoprene fabric (which is not so cheap), and to try that one next.
Another possibility to address the issue at hand is to select different omni wheels. There are some very nice ones out there on the market but usually they come with a heavy price tag. I did find some alternative wheels with rubber rollers, and a somewhat different configuration that are still at an acceptable price (less that 6 euros per wheel, about the same price as the ones I am currently using), so I should be trying those next.

Low cost of the final product is an important goal of this project, that is why I always try first the cheaper alternatives, and not necessarily the ones that look more promising. It would certainly be cheaper for me if I invested directly on the solutions that I figure had the most chances of working on the first try, but instead I find myself spending a bit more trying to figure out the cheapest option available. However my engineering mind does get a kick out of this extra challenge.
Yet another alternative that I am now considering is to build some sort of DIY omni wheel lookalike. This idea was suggested by some Hackaday readers on the comments section (of the blog) when my project made the front page (Yey!). I had several nice suggestions there, but I wish to send special thanks to [jimmy_pop], and [RunnerPack] for the very helpful hints that got me on this track. The main idea here is to use a couple of rubber balls on axes placed 90 degrees apart which should work similarly to an omni wheel (but much easier to build). I believe these are called Killough wheels, and an example can be found at:
http://www.cs.hmc.edu/~dodds/projects/RobS01/Assignment4/holo.htm
I have a couple different ideas revolving around these kinds of wheels, and at least in my mind they look really great, but I worry that with only basic tools, and limited build skills the end result might not be that impressive.
I am really hoping to get it working with standard (but cheap) omni wheels, but even so I wish to explore this other alternative (i.e. DIY wheels) to have another option for very tight budgets.
My main drive to have an hardware that works consistently from the start is that I am developing the firmware on an Arduino. We all know this platform is not the easiest to debug, so my best strategy to work with it is to take "baby steps". I mean, I wan't to have something that works right away, and build up the complexity incrementally. The idea here is to write just a few lines at a time, and keep testing it frequently to catch the bugs early thus easing the debugging requirements.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.
Are you sure? yes | no