 oneohm
oneohmAfter trying out several combinations, I decided on the following sensors for the beta prototype:
Optical surface tracking
Time of flight laser displacement
Barometric pressure+temperature
Differential force (front to back)
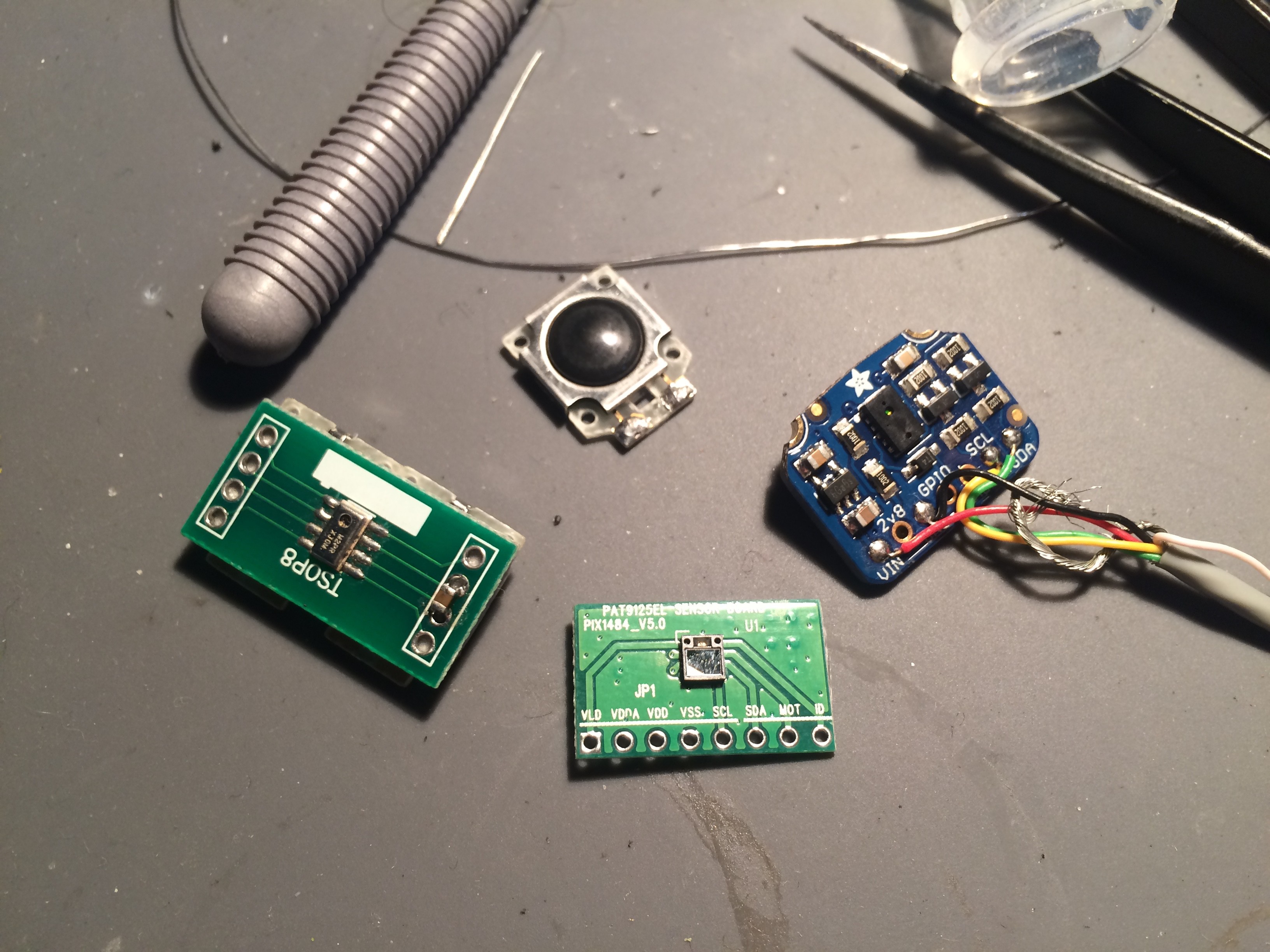
Partially Assembled:
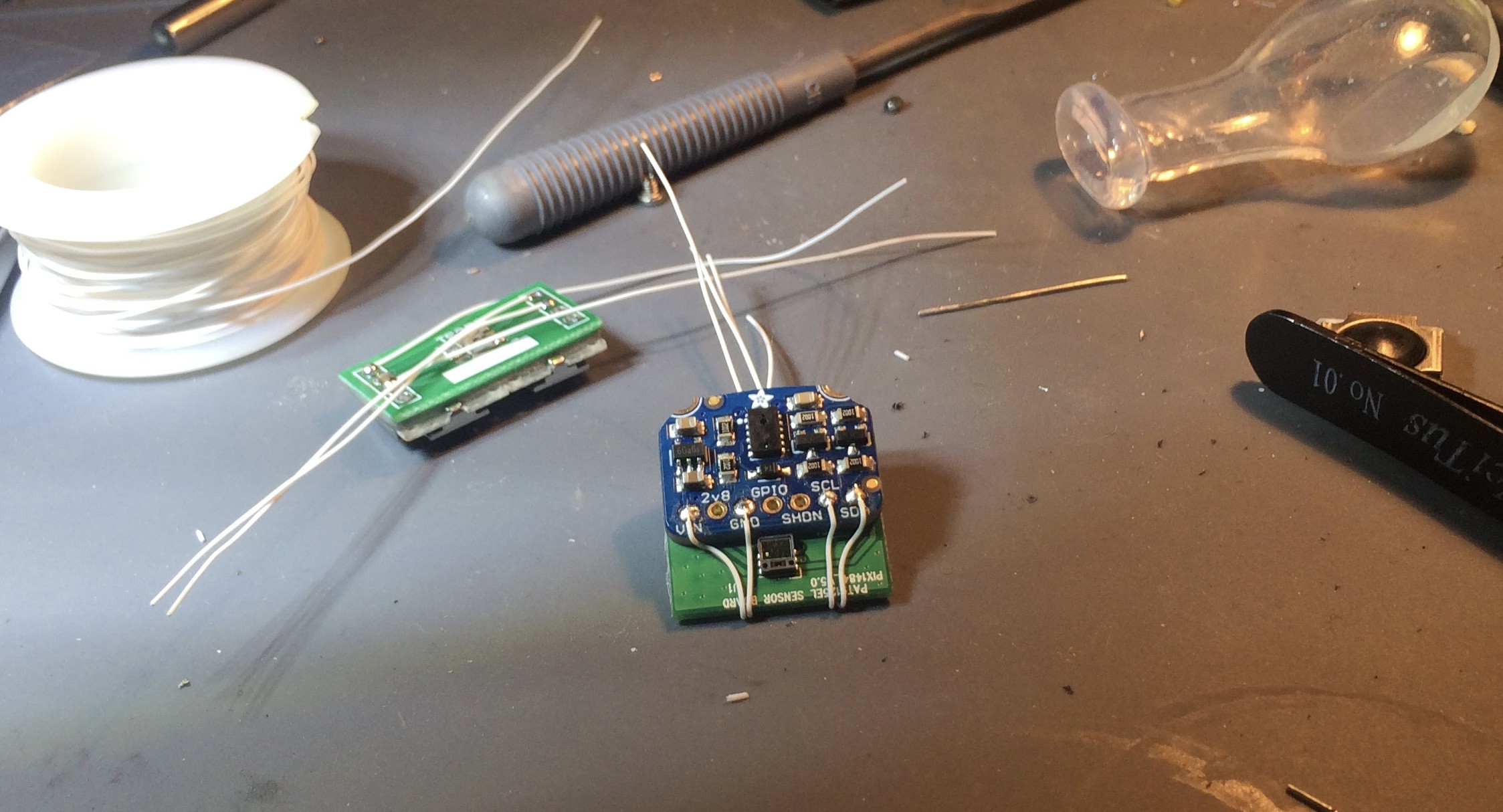
Getting Closer:
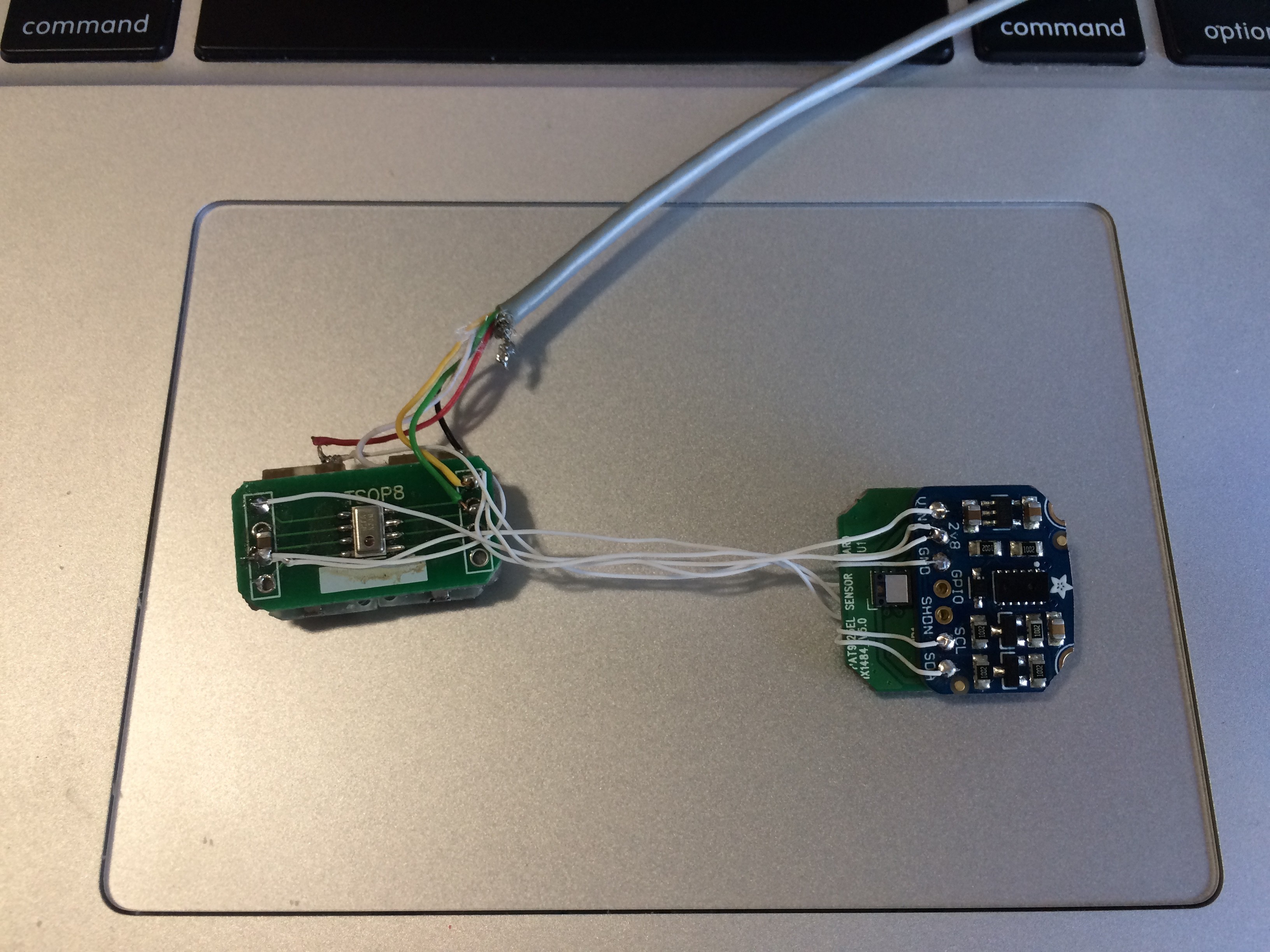
Buttoned Up:

Top side (showing front and back force sensors):

The two force sensors form a voltage divider allowing one analog pin to effectively monitor both. (Idle output voltage is half full scale)
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.