 bobricius
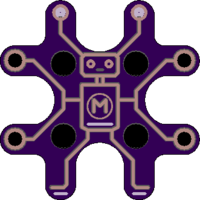
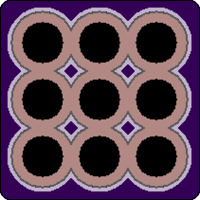
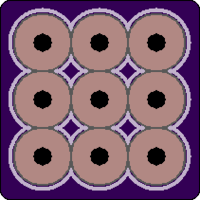
bobriciusI designed about 8 types of bots with precise magnet aliment.
Also with 0,8mm and 1,6mm thicknes and with 4layers coil.



A project log for 2D actuator move micro robot in X/Y 2D space
Less than 10$ educational platform with micro magnetic robot (mBot), only 6 GPIO to move in unlimited X/Y 2D space
I designed about 8 types of bots with precise magnet aliment.
Also with 0,8mm and 1,6mm thicknes and with 4layers coil.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.