 Andy Osusky
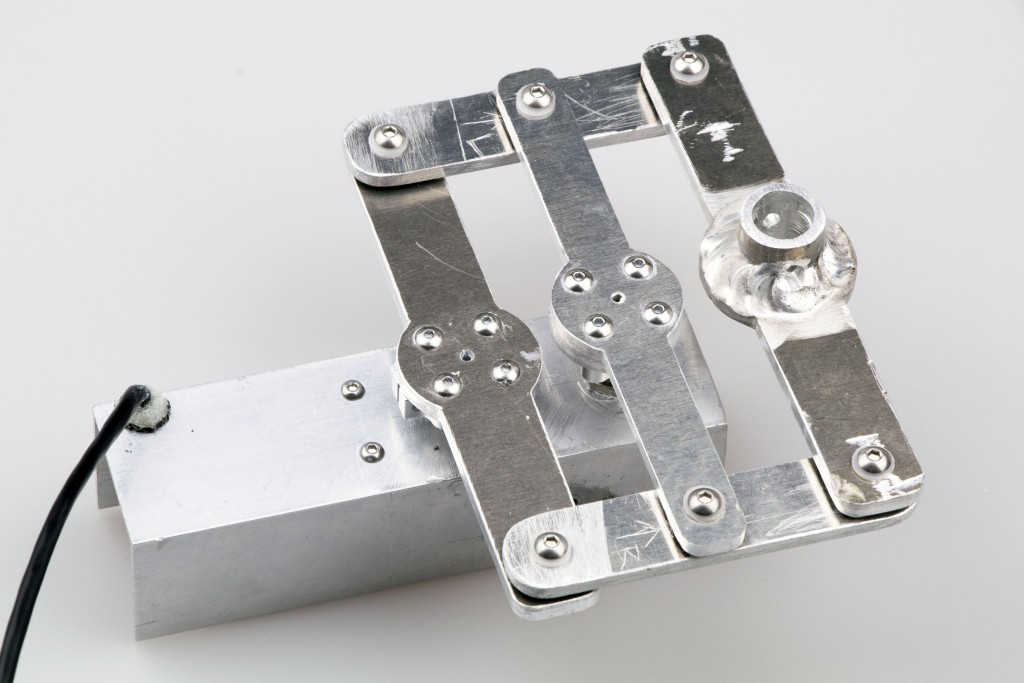
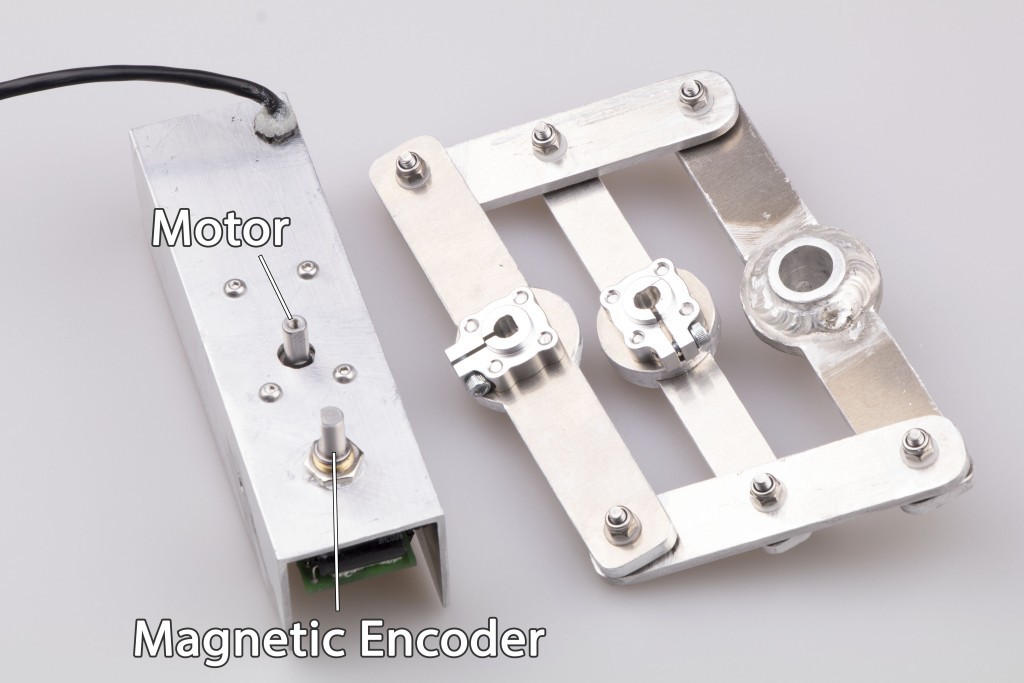
Andy OsuskyThe rudder will be driven by a worm geared brushless motor mechanically coupled to a rotary magnetic encoder that provides an absolute position feedback. A while ago, I was testing this setup and shared my results in this project log. Now I have put together a metal "servo" that can be easily connected to the rudder shaft.

Updated source code:
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.