 Paul Gould
Paul GouldComponents
- 2x Linear rails
- 4x Linear Bearings
- wood and screws
- 11.1V 1500mAh Lipo Battery
- Analogue Current Meter 20A
- Digital Current / Voltage Meter
- Robot Leg
Assembly

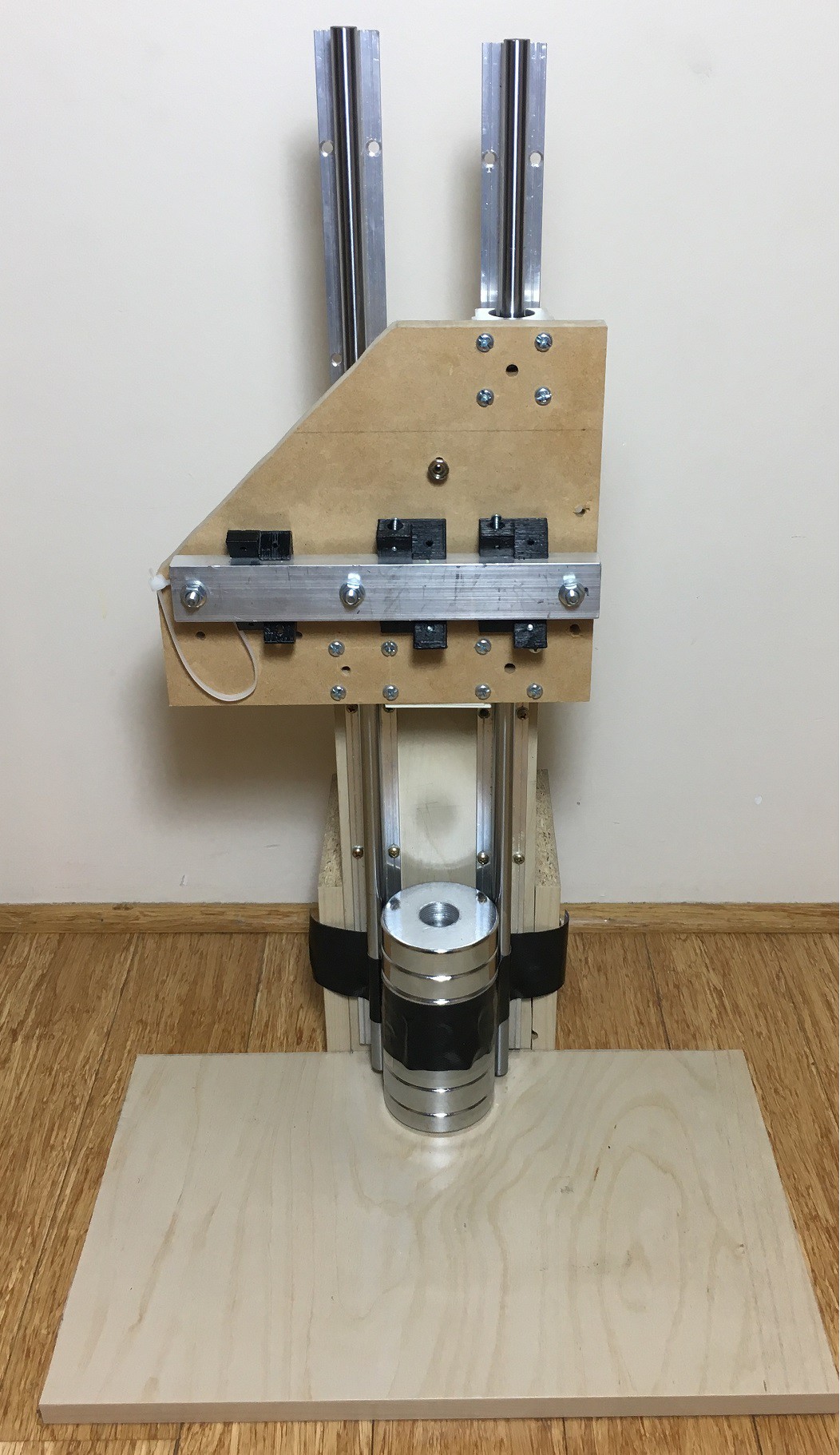
The rectangular extrusion is the same size as the quad's "backbone" and the robot's hip joins with the following design.
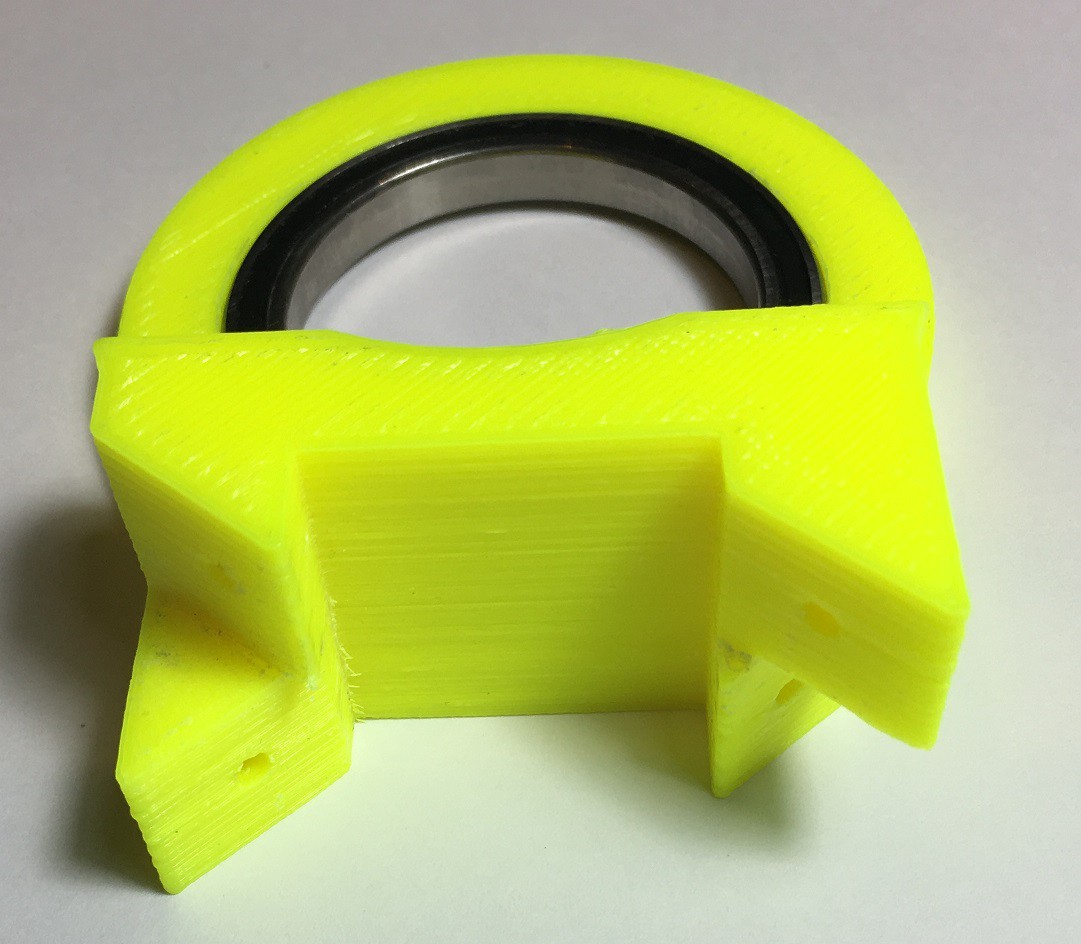
The robots hip has three mounting points to the rectangular extrusion.



Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.