 Michael Graham
Michael GrahamThis has been quite an adventure! At this point my whole basement is robots :) I converted a spare room into a temporary studio to create that video. My photography skills aren't the best but I am pleased with how it all turned out. There is a lot of time lapse in that video, I think you can get a sense of the time I spent programming all the different bots.
The core functional goals of the project have been met, that is: Being able to customize coffee mugs, allow for mechanical bot customization, and make it easy for others to copy this work. But my intention of selling some robot kits will have me working for a while yet to come. Actually, my day job work contract is ending and I am looking for a new job all of a sudden :/ but the release timing of this work is quite good in that it will keep me gainfully occupied when I need it most.
CrowdFunding Update-
I am teaming up with the folks at crowdsupply.com, a local company specializing in open source projects. I love the other projects that they have supported and I would be proud to have mine among them. One of the hardest decisions has been deciding exactly what combination of parts to offer (since this is so configurable), and how much to charge.
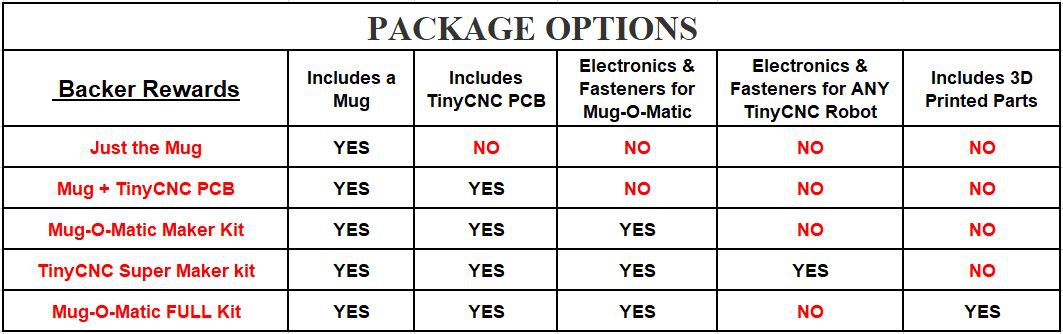
I decided to offer a joystick controller with the standard kit so people will have a way to fiddle with the MugOMatic without a computer too. And I am offering ALL the little tools, grease, cables needed to make this bot work so it will be a self contained unit.
To keep my offering simple and compelling I am only going to have a few different backer levels and all will have the highest quality components. For example all my kits include MG91 servos, which have more torque, less backlash, and better heat sinking than the common MG90s. If people want to 3d print or buy their own accessories separate, they will have that option. And if people want to save the time and get everything all at once they will have that option too.
Future Development-
*HW- none necessary.
*EE- none necessary.
*SW- All core functionality complete. But I still want to turn on new nice-to-have features like 2 way communication between robot & processing to speed up the drawing process, and turn on dot matrix drawing.
*Documentation- Everything is out there on this site. Now I am now working to organize the individual robot configurations by themselves and share each on different platforms. This will increase the chance of people finding them and improve project visibility.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.