 Danny FR
Danny FRIn the past log I started working on a robot that would be used for my video and also demo the Smart Motor Driver (SAMI) in a real life application. Here are the results :)
I am using a Pololu track set, a custom made laser cut chassis an a bit of cardboard.
The robot doesn't have any sensor or communication with the outside world. It would navigate a maze completely using pre-programmed distances on the smart motor drivers.
This will be the maze for my demonstration:
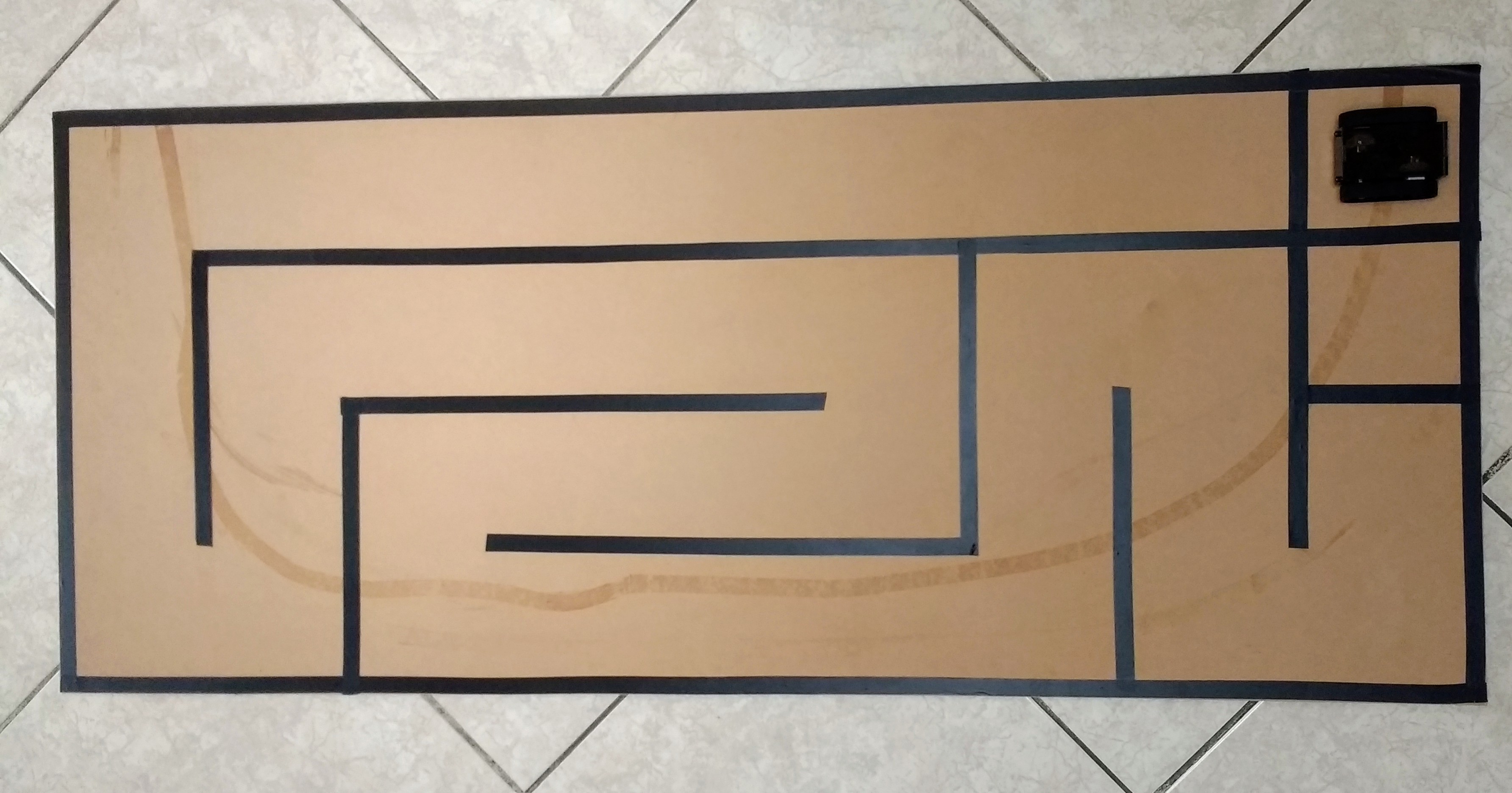
Edit: after a few tests I realised that tracks where slipping on the course surface and is almost impossible to correct that unless I use a IMU sensor. So I decided to make a new robot for the demos:
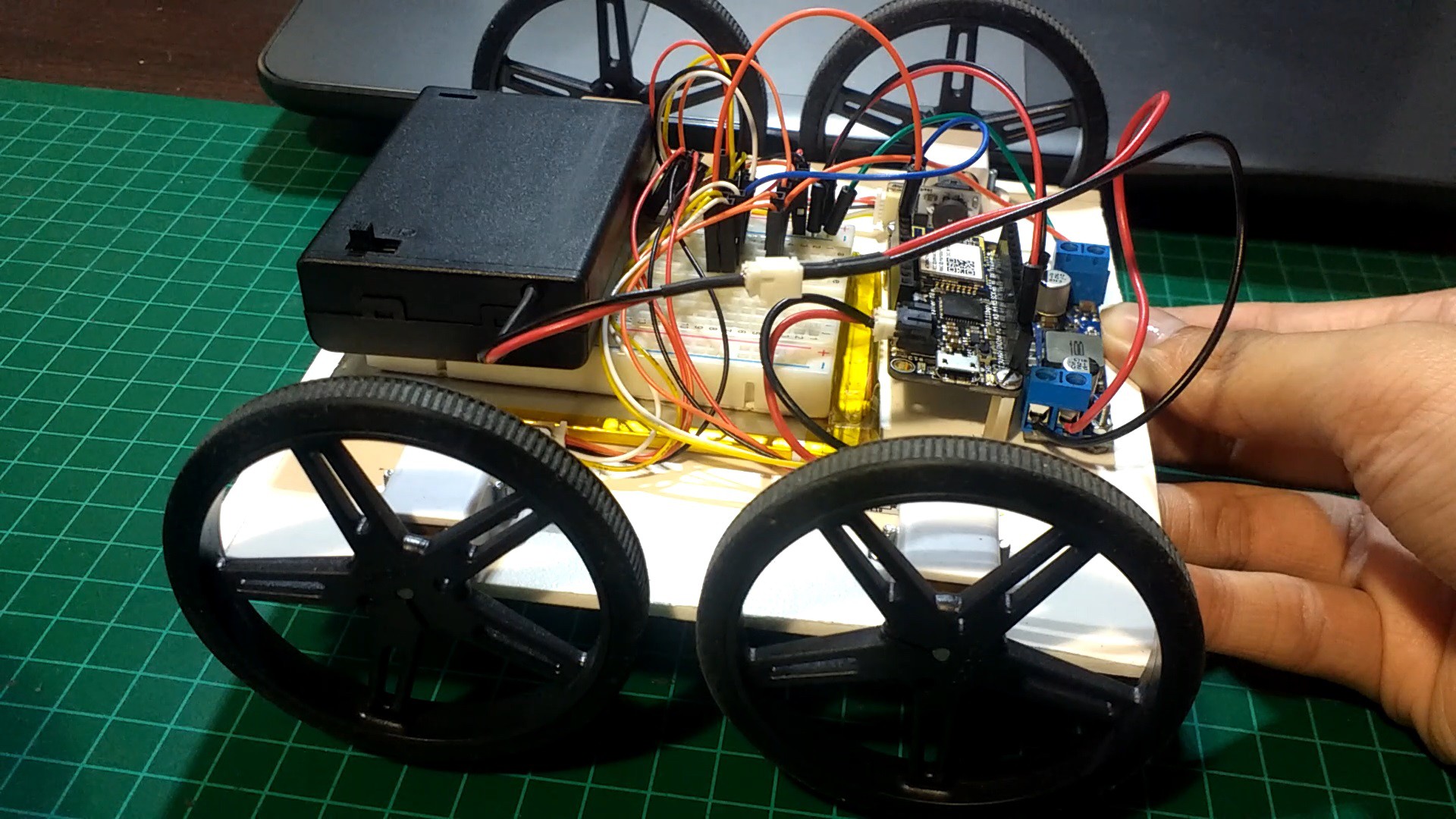
This idea will return later using an IMU to complement SAMI.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.