 Itamar Eliakim
Itamar EliakimWrote a ROS package in python for processing the image from the Logitech C170 (Code available on GitHub). In most example codes available online it's easier to detect the lane by filtering out the lane colors(white, yellow), here i did it in a narrow street so i didn't have many colors to filter out.

Based on the great tutorial of Galen Ballew:
https://medium.com/@galen.ballew/opencv-lanedetection-419361364fc0
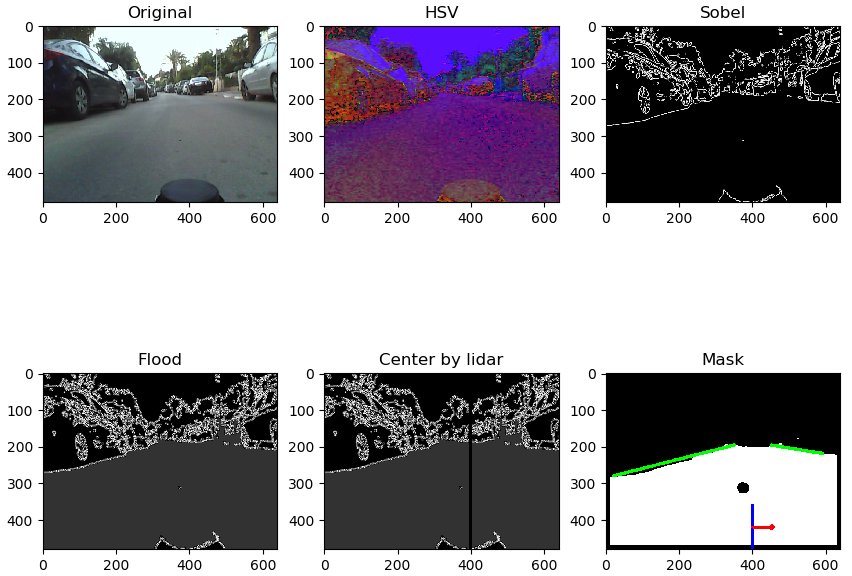
I had to do many modification so it will work without filtering the yellow and white colors, I've used the following steps:
1. Convert to HSV
2. Filter out background colors.
3. Calculating Sobel magnitude.
4. Flood Fill.
5. Split to left and right image.
5. Manually find contours.
6. Draw a line for the left and right edge.
I got the following result:
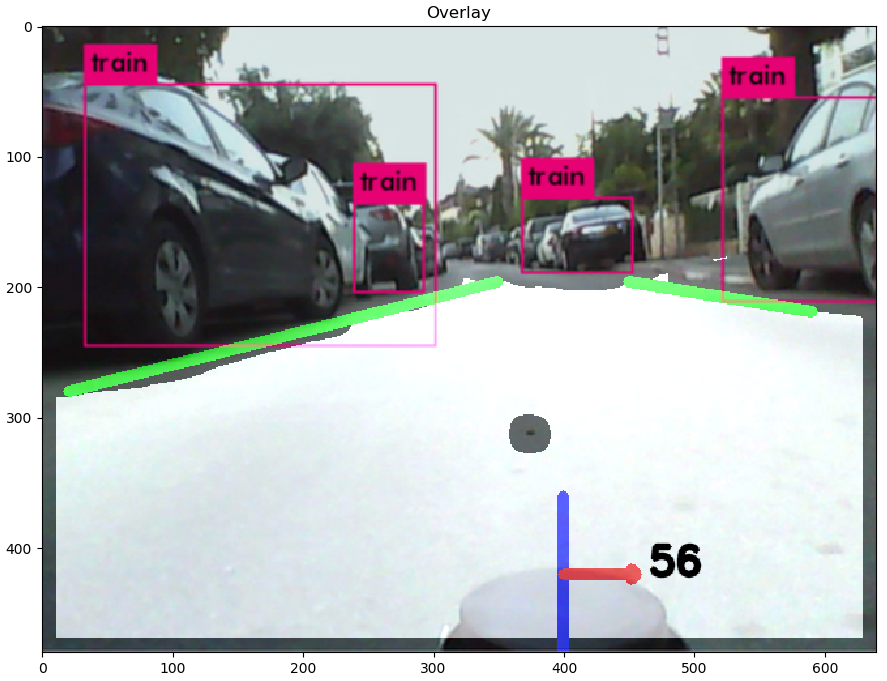
Running Yolo object detection, with VOC weights on the image(offline), we got the following result -
Next time:
- Processing XV11 Lidar scans
- Try running the processing in real-time on the orangePi.
- Odometry - Attach an encoder on the main shaft.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.