 Cole B
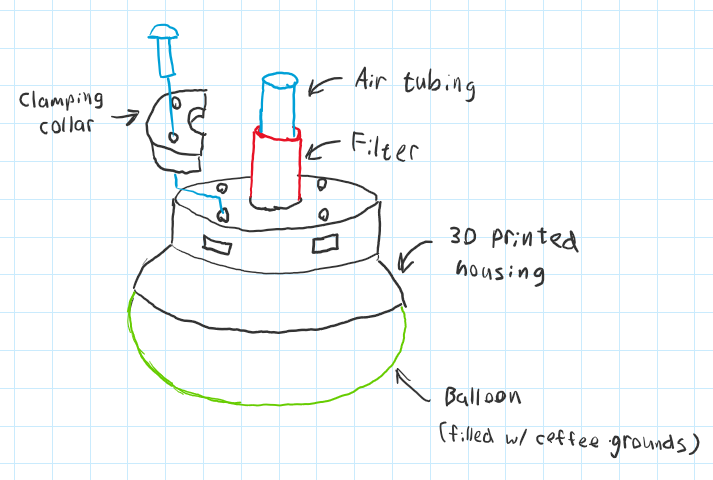
Cole BToday our team met to brainstorm ideas for the robotics module challenge. We decided to develop a low-cost, universal jamming gripper. This type of gripper is ideal for picking up a variety of small objects because the compliant design can deform to almost any shape, unlike grippers that use rigid fingers.
We are planning to design a gripper housing that can be produced using 3D printing and that includes versatile mounting options. We are also planning on creating an accompanying controller that will allow the air pump to be easily controlled by a microcontroller.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.