 Tim Wilkinson
Tim Wilkinson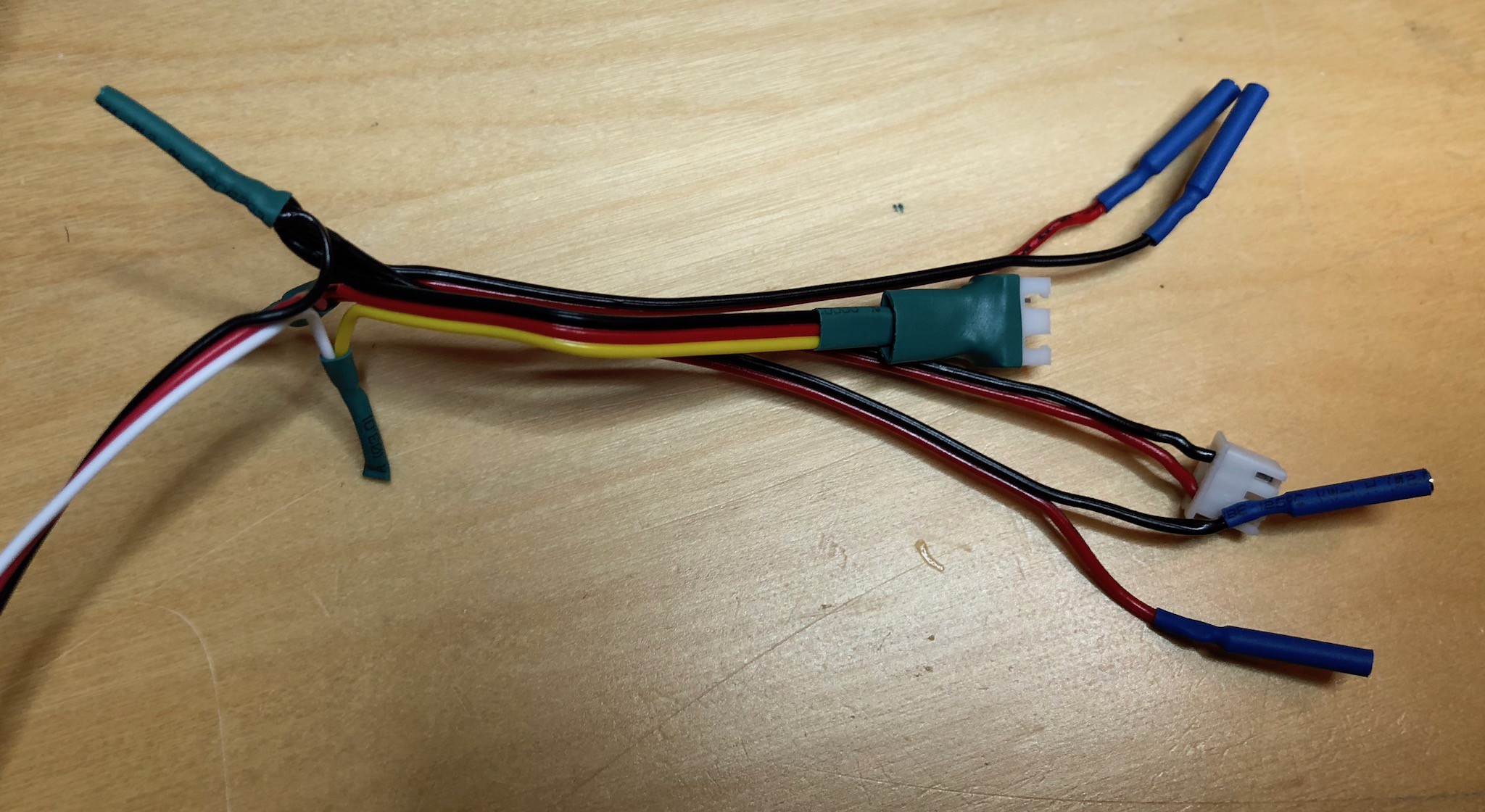
The picture above show the power harness for inside the ROV. The tether comes into the harness on the left, and various plugs and connectors are shown on the right. These connect to the ESCs power inputs, the 8BitRobot module, and the internal battery.
The tether configuration is shown below:
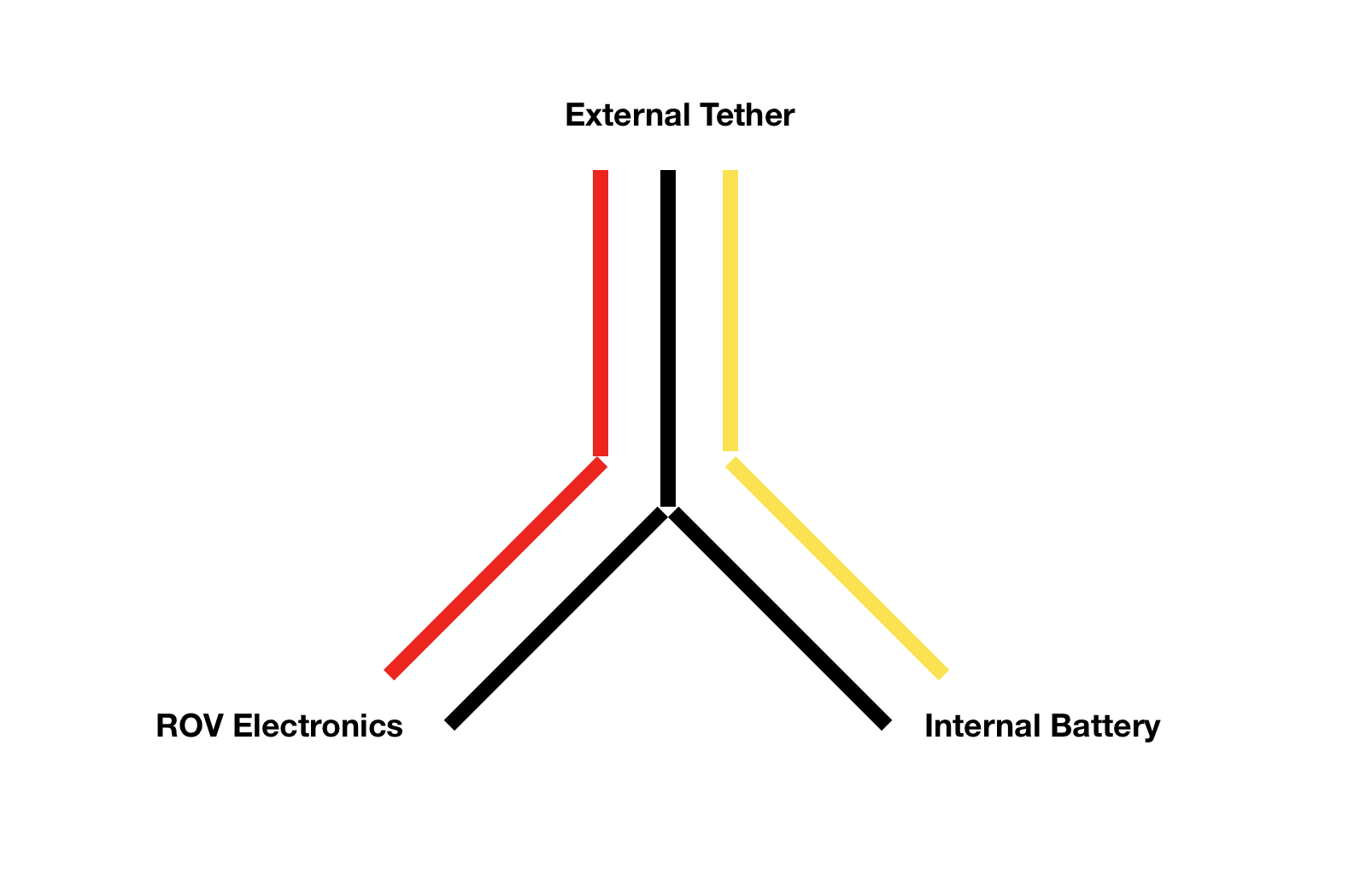
Different configuration of the tether allows different operations to be performed on the ROV:
- External power on BLACK + YELLOW: Charge the internal battery.
- External power on BLACK + RED: Power the ROV from the external power source.
- Bridge RED + YELLOW: Power the ROV from the internal battery.
These different options should (hopefully) remove the need to open the ROV except for maintenance.
Discussions
Become a Hackaday.io Member
Create an account to leave a comment. Already have an account? Log In.